惠州医疗器械行业仿真软件大纲
欲分析零件:1.阅读显示的信息,然后单击下一步。2.选择:是(推荐)以接受默认网格设置(默认单元大小和公差值)不,我想更改设定以更改默认网格设置。3.单击下一步。如果选择更改默认设置,请键入所需值或者拖动滑块。默认公差为指定单元大小的5%。单击下一步。4.单击运行。当分析完成时,一复选符号出现在分析标签上,且结果标签出现。自动网格化试验SimulationXpress在报告网格化失败之前,会使用3种不同的单元大小自动尝试对模型进行网格化。如果使用指定单元大小(E)网格化失败,程序会使用(0.80*E)的单元大小尝试进行第二次零件网格化试验,并使用(0.64*E)进行第三次试验。 SolidWorks Simulation与SolidWorks无缝集成,容易实现CAD/CAE一体 化。惠州医疗器械行业仿真软件大纲
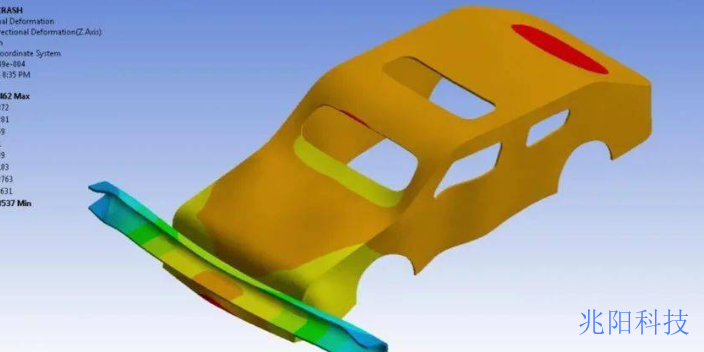
在传统的设计流程中通过物理原型机进行测试这一昂贵又耗时的流程在很大程度上被基于计算机模拟的设计流程所代替。仿真分析可以减少物理原型机的数量,进而降低产品的开发成本,缩短产品开发周期,将产品快速投放市场。在进行静态分析、频率分析、扭曲分析这些结构问题时,仿真工具所带来的好处是显而易见的。但是结构性能只是设计过程中面临的难题之一。还有许多问题是与热力相关的。热力问题常在电子产品设计中出现,为了避免过热、过高的热应力,需要在产品中加装冷却或散热装置,如风扇和散热器等。产品在解决散热问题的同时还要尽可能地减小产品体积,如手机、笔记本电脑等产品在考虑散热问题时还要保证结构的紧凑。SOLIDWORKSSimulation热分析是用来处理固体热传导的。热分析中温度是基本未知量,它类似于结构分析中的位移。热传递的方式有3种:热传导、热对流和热辐射。珠海机器人行业仿真软件应用规范Simulation作为嵌入式分析软件与SolidWorks无缝集成。
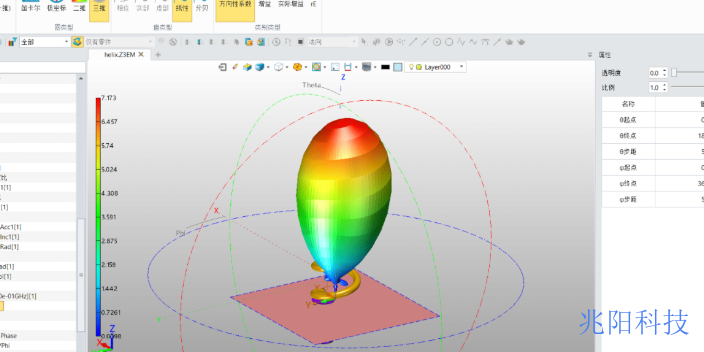
在达索系统的多物理场跨尺度仿真的战略计划之中,CFD是极其重要的⼀环,可以让客户进⾏更多接近于物理现实的仿真,因为很多的边界条件都是从流场过来的。为此,在今年9⽉底,达索系统完成了对Exa软件公司的收购,它带给达索系统⼀个全球超越他人的技术:格⼦-玻尔兹曼流体仿真技术,应⽤于⾮常极端的湍流分析,这项技术可以实现1E-6~1E-9秒的时间尺度内的流场分析,在汽车与交通运输、航空航天与国家防护、⾃然资源等多个⼯业领域都有应⽤。例如,在汽车领域,由于对节能减排的要求,包括宝马、特斯拉、丰⽥在内的汽车公司需要准确进⾏空⽓动⼒学、流体声学等⽅⾯的分析,从⽽在外形设计上更⼤幅度地提升其流线性,减少空⽓阻⼒。Exa公司在过去的20年来,积累了相当多的⾏业技术经验,Exa的加⼊,⽆疑让达索系统如虎添翼,其3DEXPERIENCE平台将能为客户提供经验证的多样化解决⽅案产品组合。
3DEXPERIENCE仿真:从端到端解决⾏业挑战例如在CFD仿真的战略布局中,达索系统针对Exa解决⽅案进⾏整合,⽬标在于为多物理场跨尺度仿真树⽴新的⾏业标准。“达索系统收购Exa,再加上达索系统本⾝也在积极研发达索系统⾃⼰的纳维-斯托克斯技术,预计在两三年之后,达索系统会有⼀个包含有格⼦-玻尔兹曼技术和纳维-斯托克斯技术的完整CFD算法。届时,⽤户可以在达索系统的3D体验平台上使⽤该算法进⾏分析计算。”DimpleShah如此介绍道。 使用不同的零部件配置、不同的装配体特征参数或不同的尺寸来生成装配体系列。
在夹具选项卡中,可以定义固定约束。每个约束可以包含多个面。受约束的面在所有方向都受到约束。必须至少约束零件的一个面,以防由于刚性实体运动而导致分析失败。应用约束至模型:1.单击下一步往下继续。2.键入夹具的名称或接受默认名称。3.在图形区域中,单击要约束的面。4.单击下一步。5.单击下一步。载荷标签出现。在SolidWorksSimulation中,还可以进行以下工作:1.应用夹具至边线和顶点。2.防止所选实体在各个所需方向发生运动。3.在各个方向上都指定位移零点(不移动)或规定的位移值。4.指定对称条件。此选项让只分析模型的一部份即可使用对称。5.指定滑动条件,在此条件下,平面或非平面可以滑动,但无法沿垂直方向移动。6.在分析库中保存普通夹具供将来使用。 Simulation和SolidWorks操作习惯相同。珠海机器人行业仿真软件应用规范
要生成一个配置,先指定名称与属性,然后再根据您的需要来修改模型以生成不同的设计变化。惠州医疗器械行业仿真软件大纲
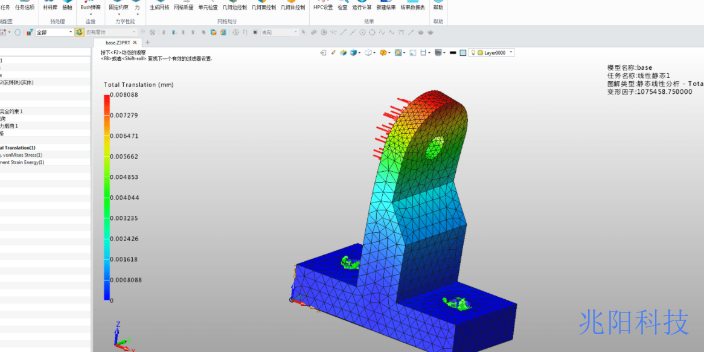
由运动分析所计算出来的应力在运行拓扑研究之前,对您的零件进行静态研究是一种很好的做法,以确保所应用的载荷不会导致违反线性静态假设的小挠度和低于零件屈服强度的应力。创建拓扑研究与静态研究没有什么不同;材料、载荷和约束都是一样的。不同的是两个新输入条件:目标和约束以及制造控制。拓扑研究的目标可以是较大限度地减少零件的质量或位移,或使其刚度(较佳刚度重量比)极大化。从较佳刚度重量比(较大刚度)选项开始,这是一个很好的做法。在拓扑研究期间,如果不希望超过该组件的相对较大位移,那么通过位移限制选项,该选项的可以较大限度的减少较大位移或较小化质量。所有三个目标总是较小化质量。惠州医疗器械行业仿真软件大纲
上一篇: 深圳有用的仿真软件设置
下一篇: 佛山半导体行业三维设计软件相关