合肥机器人电机定子生产线电话
K公司带式输送机托辊生产线平衡优化研究[D];安徽理工大学;2018年6郭晓萍;服装生产线改进与人因优化研究[D];西安工业大学;2018年7许晓伟;基于PLC的无刷电机定子生产线控制系统研究[D];合肥工业大学;2018年8茆诚;基于LabVIEW的工业机器人离线编程及示教关键技术研究[D];安徽工业大学;2018年9王运发;基于精益生产理论的混流生产线平衡及仿真研究[D];武汉纺织大学;2018年10解俊强;基于PLC的废旧油桶翻新生产线控制系统设计[D];天津职业技术师范大学;2018年【二级参考文献】中国期刊全文数据库条1邹强强;石宇强;;精益制造执行系统(LMES)的研究与开发[J];制造业自动化;2014年21期2黄少华;袁逸萍;袁亮;孙文磊;;RFID在离散制造业的研究应用[J];机械设计与制造;2014年06期3王伟;张鹏;刘庆云;;制造业中虚拟仿真技术的发展研究[J];组合机床与自动化加工技术;2013年07期4陆国强;;MES系统实现精益生产[J];新技术新工艺;2012年07期5佘建国;范晓卫;刘璐璐;孟宪振;;基于DELMIA的车用空调虚拟装配过程仿真[J];江苏科技大学学报(自然科学版);2012年03期6秦基伟;章敏凤;杨宁;;基于DELMIA/Robotics的白车身焊接机器人仿真应用[J];制造业自动化;2012年11期7武美萍;张军;刘静;。在定子生产线上,线圈绕制是关键步骤之一,采用自动绕线机或机器人进行操作,以精确控制线圈的尺寸和形状。合肥机器人电机定子生产线电话
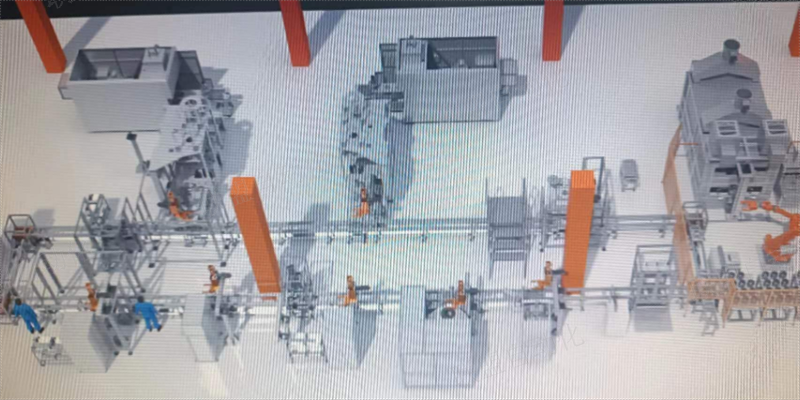
电机定子生产组装线,电机定子制造生产线皮带线。此自动定子生产线适用于电机定子的制造。线体上可以接入多款设备,主要包括插纸机,插端板机,三针式绕线机,定子端子压装机,电性能检测机以及追溯系统组成产品视频电机定子制造生产线皮带线设备简介Introduction:此自动定子生产线适用于电机定子的制造。线体上可以接入多款设备,主要包括插纸机,插端板机,三针式绕线机,定子端子压装机,电性能检测机以及追溯系统组成。整线由全自动单机设备配合皮带流水线组成,操作工补充原材料,设备自动完成各工序的加工,工件自动被移至下一工序。工艺参数可在触摸屏上存储并可随时调用。各工位可与追溯系统进行信息交流,方便产品数据的调用以及存储。高智能化,自动化程度高,效率高,精度高,低噪音。设备有远程诊断功能。合肥机器人电机定子生产线电话定子生产线的发展趋势是向着更高效、更智能、更环保的方向发展,以满足市场对高性能、高质量电机的需求。

《合肥工业大学》2018年收藏|手机打开手机客户端打开本文基于PLC的无刷电机定子生产线控制系统研究许晓伟【摘要】:随着“中国制造2025”计划的逐步实施,国内依靠廉价劳动力、粗放式发展的制造业,正面临着产业转型升级,多品种、小批量需求己经成为一种趋势。无刷电机在计算机设备、家电产品、医疗器械、汽车、精密电子等行业的广泛应用,使得各大电机生产厂家相继投入大量资金用于无刷电机的研发。传统的无刷电机生产没有自动化的生产线,只有一些自动化专机设备,工序与工序之间靠人工搬运完成,工人劳动强度大,生产环境恶劣,质量无法保证。因此,对无刷电机自动化生产线控制系统的研究具有重要的现实意义。本课题以X公司无刷电机生产线建设为背景,以PLC为控制,用工业机器人将定子生产线中的各专机设备连接起来组成自动化生产线,具体研究内容如下:首先,对无刷电机定子生产线进行了整体规划,分析了人工无刷电机定子生产现状及存在问题,提出了一种以工业机器人进行上下料的无刷电机定子自动化生产工艺,将生产线规划为4个工位并由4台六轴工业机器人完成上下料。经过生产线平衡分析,该生产线平衡率达到了(57s),满足预先设定的目标。其次,在SolidWorks中建立了生产线的三维模型。
[0085]20为排线机构、21为外管、210为多边形体、22为内管、220为多边形体、221为连接螺纹;[0086]30为绕线模具、31为绕线头、310为通孔、311为安装槽、32为拨叉机构、320为推头、321为拨叉、322为环形槽、323为凸起、324为铰接块、325为连接部、326为第二连接部、33为盖、330为槽、331为台阶、332为孔、333为凹槽、334为汇线板、335为通孔、34为线嘴机构、340为滑块、341为线嘴、342为连接块、343为凹槽、345为跨接块、346为第二连接块;[0087]40为驱动机构、41为电机、42为主轴、420为凹槽、421为滑槽、43为驱动臂、44为滑块机构、440为导杆、441为滑块本体、442为安装孔、443为通孔、444为轴承、445为内管连接座、45为支撑座、46为传动机构、460为带轮、461为皮带、462为传动齿轮箱、463为齿轮、464为过桥齿轮、465为第二齿轮、47为第二传动机构、470为第二电机、471为伞齿轮、472为第二伞齿轮、48为偏心调整机构、480为连接座、481为丝杆安装座、482为行程调节丝杆、483为滑块、484为螺纹。定子生产线具有自动化程度高、生产效率高、产品质量稳定等优势,能够满足大规模、高效化生产的需求。
如何获取全文?欢迎:购买知网充值卡、在线充值、在线咨询)CAJViewer阅读器支持CAJ、PDF文件格式【参考文献】中国期刊全文数据库条1徐光;肖小亭;;基于RobotStudio的水槽机器人抛光路径研究[J];机电工程技术;2015年09期2王欢;石宇强;邹强强;;叶片生产车间精益制造执行系统的研究与开发[J];机械设计与制造;2015年07期3冯江涛;肖小亭;赵娜;孙友松;阮卫平;李振石;王凯;;Delmia环境下的自动化冲压生产线设计及仿真分析[J];广东化工;2015年03期4郭水军;张华;杨旭静;;基于DELMIA的冲压生产过程仿真与优化[J];锻压技术;2015年01期5张姗姗;许元鸣;陈科;郑红梅;;基于DELMIA的变速箱虚拟装配仿真研究[J];合肥工业大学学报(自然科学版);2014年11期6于冬梅;高波;杨磊;;汽车发动机连杆加工精益制造技术研究[J];机械设计与制造;2014年04期7佘建国;范晓卫;刘璐璐;孟宪振;;基于DELMIA的车用空调虚拟装配过程仿真[J];江苏科技大学学报(自然科学版);2012年03期8秦基伟;章敏凤;杨宁;;基于DELMIA/Robotics的白车身焊接机器人仿真应用[J];制造业自动化;2012年11期9沈波;;DELMIA在ARJ21飞机翼装配仿真中的应用[J];中国制造业信息化;2011年11期10汪凯;。通过自动化生产线,可以实现生产过程的高度可控性和可追溯性。温州机器人电机定子生产线单价
采用自动化生产线可以实现生产过程的快速调整和灵活性,适应市场需求的变化。合肥机器人电机定子生产线电话
该压臂551的一端与第二直线驱动器的动力输出端连接,压臂551的另一端与护线套56固定连接。所述的压臂551呈“L”形,压臂551沿着定子铁芯的径向布置,压臂551的一端与一个第二垂直移动座552连接,该第二垂直移动座552分别与第二滑块516和第二直线驱动器550的动力输出端连接。[0122]护线套56沿定子铁芯90轴向布置,护线套56的一端与第二驱动机构连接,所述压紧套54环绕在护线套56的周围且压紧套54与护线套56同轴布置。所述护线套56包括至少具有一个开口端的护线套本体560,沿护线套本体560开口端轴向延伸的压线舌561,该压线舌561的壁厚小于护线套本体560的壁厚;在护线套56的周面上至少设有一个缺口562,该缺口562从压线舌561的远离护线套本体560的端部延伸到护线套本体560上。[0123]如图27所示,在绕线工作时,压紧套54压在定子铁芯90的外圆台阶91上,起到轴向压紧定子铁芯90的作用,使定子铁芯90在绕线的受力过程中不松动和走位保证了机器的正常运行。本实用新型的绕线机一次可以对定子铁芯90上的三个骨架90a绕制漆包线,当三个骨架90a上绕制的匝数达到要求时,则需要通过挑线机构70将漆包绕挑出,换到另外三个骨架90a上继续绕制,这时通过挑线机构直接伸到压紧套54附近。合肥机器人电机定子生产线电话
上一篇: 福建电阻熔接机有哪些
下一篇: 杭州滴漆机哪里有