AI复合机器人控制
复合机器人也称为移动机械臂、复合操作机器人和移动操作机器人。它们通常被称为英国移动操纵器。有一个复合机器人“手、脚、眼、脑”。与AGV/AMR机械手相比,单一功能不仅结合了两者的特点,而且更加灵活。半导体、33、C复合机器人可以在电子、医疗、日化、机械加工等传统制造业的零部件组装中发挥巨大作用,实现无人智能生产。目前,复合材料机器人的应用尚处于起步阶段,但发展迅速。生产线的柔性化复合机器人完成了一道工序就可以进行下一道工序,具有较的灵活性。并且多台复合机器人组成移动的装配台、加工台使用,可形成度柔性生产线。达明机器人(上海)有限公司为您提供复合机器人,有想法的不要错过哦!AI复合机器人控制

随着工厂内部制造复杂程度的日益上升,对于自动化设备柔性化的需求也更加迫切,相比于AGV/AMR和机械臂的单一功能,了两者特性的复合移动机器人显然更具柔性化,达明机器人全系列产品可与市面上多种类型的AGV/AMR无缝对接,轻松变身为达明移动复合机器人。达明机器人作为全球协作型机器人和智能视觉系统先驱,致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。 广东组装复合机器人价格达明机器人(上海)有限公司为您提供复合机器人,有想法可以来我司!
AGV复合机器人是一款采用移动AGV底盘结合机械臂进行工业协作的机器人。采用激光导航技术,配备内置传感器和成熟的系统软件,AGV复合机器人可通过调度系统按既定巡航路线接受指令到达定点位置完成指定的抓取搬运等动作。运用SLAM算法,配备完善的安全系统及模块,使AGV复合机器人具备安全、操作简单、作业灵活等多重优势,大幅度简化现场应用过程,适合对空间和路径要求比较的物流系统或工业场景运用。这种模块化的设计特点对于机器人期的拆装更换、维护维修等方面是十分便利的。柔性复合机器人的运作是不需要进行任何控制柜的外接的,这对于机器人的抓取、行走等行为的控制来说也十分方便。
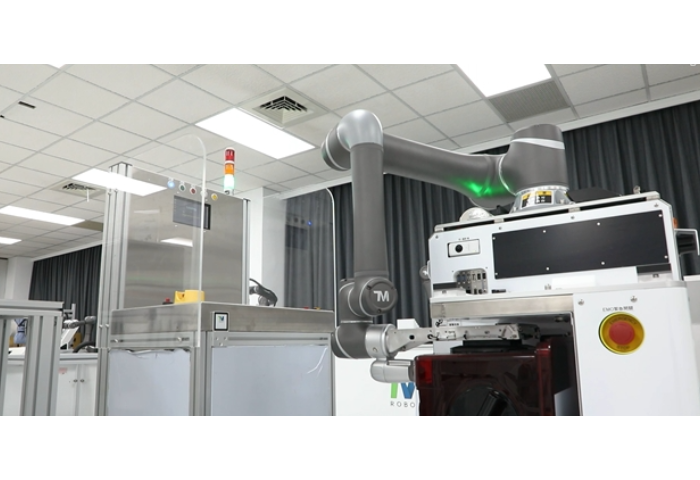
案例:群创光电。该工厂应用了达明移动复合机器人-TM12M进行晶圆盒上下料,基于激光SLAM的混合定位导航技术,实现室内 ±5mm的重复定位精度,有效对接各种设备;导入TM landmark 应用,复合机器到位,达明机器人通过自带视觉完成晶圆盒的精度上下料。平稳取放,非常适用于医疗及半导体等行业移动搬运、智能巡检、移动式堆栈、加工机床上下料等要求机动性、精度的应用致力于研发和应用自动化科技,以创的自带智能视觉结合手臂,加上AI+人工智能系统,手眼脑合一,提升机器人能力、弹性与易用度,协助企业大幅降低导入自动化人力与时间成本。达明机器人(上海)有限公司致力于提供复合机器人,有想法的不要错过哦!

复合型机器人(Hybrid Robot)是一种结合了多种机器人技术的综合性机器人系统,包括机械臂、移动平台、传感器、视觉系统、人工智能、控制系统等,具有复杂的动作控制和度智能的特点,可以适应多种复杂环境,并完成多种任务。复合型机器人的应用范围非常,包括制造业、物流和仓储、医疗保健、教育和娱乐等领域。例如,复合型机器人可以用于汽车生产线上的机械加工和装配、仓库和物流中的货物运输和分拣、医疗保健中的手术和康复等。达明机器人集成创夹具及视觉,即使在非结构化环境中,达明机器人也能识别、拾取各种物体,部署于复杂度更的自动化生产流程中。且达明机器人易于编程,用户更可以通过其示教器快速部署任务,非常适合小批量应用以及重复性任务。复合机器人,就选达明机器人(上海)有限公司,欢迎客户来电!AI复合机器人控制
达明机器人(上海)有限公司是一家专业提供复合机器人的公司。AI复合机器人控制
复合型机器人的优点包括:度智能化:复合型机器人采用了多种级技术,如人工智能、视觉识别和自主规划等,可以实现度自主化和智能化的操作,减少人工干预和提工作效率。多功能性:复合型机器人可以在不同的环境下执行多种任务,如搬运、装配、打磨、切割、检测等,具有度的灵活性和多功能性。精度:复合型机器人具有精度的运动和行为控制,可以实现精细的操作和精确的加工、装配等任务,提了产品质量和工作效率。安全性:复合型机器人通常具有多重安全措施,如传感器监控、防碰撞装置等,可以确保机器人的安全性,减少事故发生的可能性。提生产效率:复合型机器人可以在24小时内不间断地工作,而不需要休息和休息时间,可以提生产效率和降低生产成本。可重构性:复合型机器人通常具有可重构性和可定制性,可以根据任务的需要进行组合和重构建,实现多样化的应用和适应不同环境的需求。环保节能:复合型机器人可以在生产和运作中减少能源的浪费和环境污染,提生产的环保性和节能性。AI复合机器人控制
上一篇: 四川AI复合机器人价格
下一篇: 广东AMR复合机器人推荐