工业级三维扫描仪销售电话
三维扫描仪还可能采用光学投影原理。这种原理通过投影仪将光斑投射到物体表面上,然后使用相机对光斑进行观测和测量。为了识别和跟踪光斑,有时需要在物体表面粘贴标记点。相机记录下光斑的坐标,并通过计算光斑的位置和角度来确定物体表面的轮廓。通过对不同角度下的光斑进行观测和测量,可以获取物体表面的三维坐标数据。在扫描过程中,三维扫描仪会根据固定在被检测物体表面的视觉标记点来确定扫描仪在扫描过程中的空间位置。这些空间位置信息用于空间位置转换,确保获取的三维信息的准确性。终,通过收集和处理这些三维数据,三维扫描仪可以生成物体的三维模型。这些模型在工业设计、质量检测、逆向工程、文化遗产保护等领域有着广泛的应用。需要注意的是,不同的三维扫描仪可能采用不同的原理和技术,因此在选择和使用时应根据具体需求和物体特性进行考虑。同时,随着技术的不断发展,三维扫描仪的性能和精度也在不断提高,为各种应用领域提供了更加准确和可靠的三维数据。无论是小型零部件还是大型建筑,三维扫描仪都能以出色的性能完成测量任务。工业级三维扫描仪销售电话

三维扫描仪的原理主要依赖于光学、激光和结构光等技术,通过这些技术获取物体表面的几何形状和纹理信息,进而实现物体的三维建模或数字化重建。首先,我们来看激光扫描原理。激光扫描仪利用激光束对物体进行扫描。激光束发射到物体表面后,部分光线被反射回来,通过测量激光从发射到接收的时间差,结合光速的已知值,可以精确计算出物体表面各点与扫描仪之间的距离。同时,扫描系统通过控制激光束的方向和位置,实现对物体表面的各方面扫描。通过收集这些距离数据,并结合扫描系统的空间位置信息,可以构建出物体的三维点云数据。结构光扫描原理则是利用特定的光模式(如线光源产生的激光平面)投射到物体表面。当结构光照射到物体时,其形状会随物体表面的形状发生变形。通过捕捉这些变形的光模式,并结合图像处理技术,可以提取出物体表面的三维信息。结构光扫描技术具有高速度、高精度和高分辨率的特点,适用于各种复杂表面的扫描。上海三维扫描仪价钱通过三维扫描仪获取的数据,可以为3D打印提供精确的模型源文件。
选择高质量的扫描设备:市场上存在多种品牌和类型的三维扫描仪,如结构光扫描仪、激光扫描仪等。在选择时,应关注设备的精度和分辨率参数,选择具有高精度和高分辨率的设备。上海翌彩提供加拿大进口三维扫描仪,性价比高。设置合适的扫描参数:不同的物体或场景需要不同的扫描参数。在进行扫描之前,需要根据实际需要调整扫描仪的参数,如光源强度、曝光时间和分辨率等。适当提高光源强度和曝光时间有助于提高扫描的清晰度和精度。保持稳定的扫描环境:扫描过程中,环境的稳定性对扫描的精度和准确性至关重要。应避免强光、强风、振动等外部因素的干扰,尽量保持扫描场景环境的稳定。使用辅助标记和支架:对于复杂的物体或需要多个视角扫描的场景,使用辅助标记和支架可以提高扫描的准确性和重建的稳定性。例如,特定的标记点或固定物体可以提供更准确的定位和对齐信息。进行定期校准和维护:定期对三维扫描仪进行校准可以确保其精度和稳定性。同时,保持设备的清洁和良好工作状态也是提高精度的重要措施
三维扫描技术在汽车制造领域的应用日益宽广,为汽车制造业带来了变革性的改变。三维扫描技术在汽车制造中的逆向工程与设计优化:三维扫描技术能够快速获取汽车部件或整车的高精度三维数据,用于逆向工程。设计师可以利用这些数据,对汽车进行更精确的设计和修改,优化汽车的性能和外观。质量检测与控制:在汽车制造过程中,三维扫描技术可用于检测零部件的精度和匹配度,确保生产出的零部件符合设计要求。这有助于提高汽车的制造质量和一致性。通过对整车进行扫描,可以检测装配误差和变形等问题,确保整车的质量达到标准。定制化生产:借助三维扫描技术,汽车制造商可以根据客户的需求和偏好,定制个性化的汽车部件或整车。这为客户提供了更多的选择和灵活性。三维扫描仪能够快速捕捉物体的动态变化过程,为动态分析提供了有力支持。

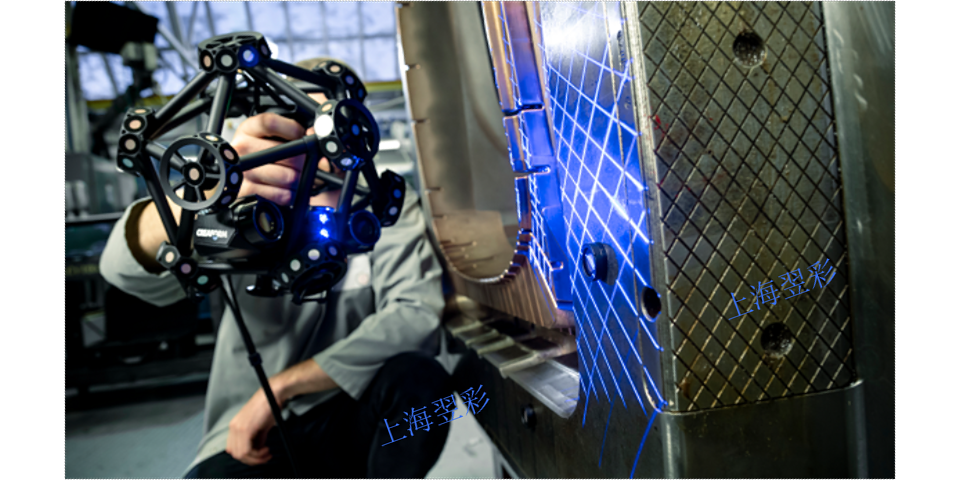
结构光扫描原理:投射结构光:使用线光源产生狭窄的激光平面(如宽度小于0.4mm)或其他结构光模式,并将其投射到被扫描物体表面。捕获变形光:当结构光照射到物体表面时,其形状会随物体表面的形状而发生变形。摄像机捕捉这些变形的光模式。提取三维信息:通过分析捕获到的变形光模式,可以提取出物体表面的三维信息。结构光测距技术利用照明光源中的几何信息帮助提取景物中的几何信息,从而快速、准确地获取三维数据。数据处理与重建:空间位置确定:三维扫描仪通常还使用固定在被检测物体表面的视觉标记点来确定扫描仪在扫描过程中的空间位置。这些空间位置信息用于空间位置转换,确保获取的三维信息的准确性。三维扫描仪的高精度测量技术为机器人导航和定位提供了可靠的数据支持。四川三维扫描仪销售
三维扫描仪的便携性和易用性,使得它成为现场测量和迅速建模的理想选择。工业级三维扫描仪销售电话
维扫描仪的使用方法如下:将C-Track的一端线路连接好,然后将其与控制器连接起来。再将数据线连接到扫描头上,并将扫描头数据线连接到控制器。连接电源与网络:连接控制器的电源,并使用网线将控制器与电脑连接起来。启动与预热:启动控制器进行预热,同时启动相应的软件,完成连接。设备校准:按照指示进行C-Track、扫描头和侧头的校准,确保设备精度。扫描前准备:检查电池、电池架、电缆、充电器等附件是否齐全,并确保电池充满电。将电池、激光扫描仪和电池架连接牢固。将激光扫描仪稳固地固定在三脚架上,并对准扫描目标。插入存储U盘,打开电源,让扫描仪进行自检和优化。连接控制设备(如计算机或PDA)与扫描仪,并检查连接是否成功。扫描操作:设置存储文件名及其路径。获取目标图像,选定扫描区域。计算目标平均距离,设置扫描间隔。开始扫描目标,注意天气状况,如系统报警须停止工作。扫描后处理:等待激光扫描仪处于待机状态后,关闭电源。进行散热和清洁,然后将设备连同附件一同装箱保存。使用计算机软件对采集到的3D点云数据进行后处理。工业级三维扫描仪销售电话
上一篇: 北京影像仪电话
下一篇: 浙江型材断面测量仪型号