广东自动主驱电机自动化产线
图18Map图横纵坐标分割数说明[Correction]系数校正可以应用于效率或损耗。[TableCorrection]在[TableCorrection]中选择[Efficiency]或[Loss]时,输入每个速度和扭矩的修正值。可以输入超过**大速度或**大扭矩的值。表7修正系数含义描述类型描述[NoCorrection]不使用系数校正。[Efficiency]系数校正应用于效率。[Loss]系数校正应用于损耗。显示效率图。图19效率图显示操作注意点:计算的点数不能太少,比如电流幅值4个,相位角3个,转速3个,计算后不能显示MAP图。速度优先不能考虑AC损耗,如果按计算AC损耗进行了设置,输出响应表中铜损值为0。为了减小文件大小和加快计算速度,可以不输出网格,如下图所示。图20输出控制属性设置界面计算前是否需要通过设置转子初始位置角让d轴和U轴重合?不需要,软件会通过offset自动设置为重合。图21转子初始位置角度设置界面效率图Study支持Multi-slice条件,、分布斜极和V型斜极。但是无法确认每个slice的结果。速度优先模式不能考虑涡流损耗。不支持使用稳态近似瞬态分析,时间周期显式误差校正。不支持extendedslide,generatemeshforeachstep(patchmesh)网格。4分析结果(1)效率图从公开资料看,Prius2017**大效率97%。主驱电机的咨询以及方案。广东自动主驱电机自动化产线
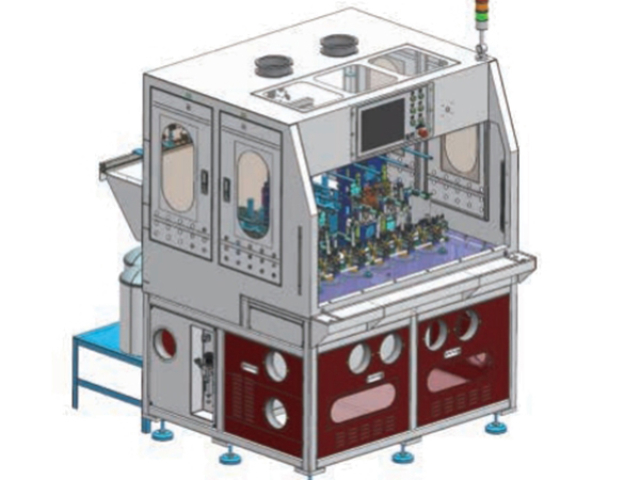
主驱电机
那么操作性能肯定不好,感觉很笨重。配有储气罐,可在断气情况下继续使用一个循环,同时会报警,提醒操作者,在气压下降到一定程度,启动自锁功能,防止工件下降。并设有安全系统,在搬运过程中或是工件没有被放置在安全工位时,操作者不能释放工件。配合各种非标夹具,硬臂式助力机械手可以实现起吊各种形状的工件。此类机械手,具有刚性手臂和全程重力平衡等诸多***,因此被广泛应用于需要越过障碍、要求精确定位、取置状态受限、现场环境复杂、或系统承受扭力等场合。安装形式可以是立柱式(地面固定)、悬挂固定式或是导轨移动式。助力机械手是一款真正的有效成本投资,短期投资回报效益非常高的工业物料搬运机械设备。不同型号为不同的应用,在解决包/袋,纸盒/箱,油桶,提桶,纸/塑料卷,空调,冷凝机,压缩机,金属铸件,模具,砂芯和各种汽车零部件包括仪表盘,天窗,轮胎,车门,变速器,汽车底盘,车桥,发动机,发动机缸体等物件搬运方面有着事半功倍的效率。长春绿色环保主驱电机半自动产线主驱电机生产装配厂家。

**小分割数为5。[TorqueDivisions]转矩从0到**大转矩采用等间隔划分。**小分割数为5。[SpeedDivisions]设置为3,[TorqueDivisions]设置为5,如下图所示。图18Map图横纵坐标分割数说明[Correction]系数校正可以应用于效率或损耗。[TableCorrection]在[TableCorrection]中选择[Efficiency]或[Loss]时,输入每个速度和扭矩的修正值。可以输入超过**大速度或**大扭矩的值。表7修正系数含义描述类型描述[NoCorrection]不使用系数校正。[Efficiency]系数校正应用于效率。[Loss]系数校正应用于损耗。显示效率图。图19效率图显示操作注意点:计算的点数不能太少,比如电流幅值4个,相位角3个,转速3个,计算后不能显示MAP图。速度优先不能考虑AC损耗,如果按计算AC损耗进行了设置,输出响应表中铜损值为0。为了减小文件大小和加快计算速度,可以不输出网格,如下图所示。图20输出控制属性设置界面计算前是否需要通过设置转子初始位置角让d轴和U轴重合?不需要,软件会通过offset自动设置为重合。图21转子初始位置角度设置界面效率图Study支持Multi-slice条件,、分布斜极和V型斜极。但是无法确认每个slice的结果。速度优先模式不能考虑涡流损耗。不支持使用稳态近似瞬态分析。
本实用新型所提供的一种新能源电机的原理以及使用方式如下:所述新能源电机以48v电机为基础,电机的构造参照51槽三相电机,电源7通过控制器10控制输出48v直流电压,在电机线圈绕组2外圈增加一圈发电机线圈绕组3,电源7输出电流施加于定子铁芯1的电机线圈绕组2,电机线圈绕组2通电后,转子4旋转,端盖5随转子4旋转,转子4旋转带动永磁极42旋转,发电机线圈绕组3切割永磁极42旋转产生的磁场发电,发出的是三相交流电,单个相输出电压为150v交流电;使用时,将进线轴管61和出线轴管62分别水平架设于支架100上,电机线圈绕组2的电机引出线伸出进线轴管61并与电源7电性连接,发电机线圈绕组3的发电机引出线伸出出线轴管62并与三相整流桥8电性连接,三相交流电通过三相整流桥8整流,输出240v直流电压,向充电器9供电,从而实现发电功能;同时,转子4的旋转,即电机的做功,转子4旋转带动轮缘44旋转,将电源7提供的电能转化为机械能。所述新能源电机,既是电机又是发电机,电机在做功的同时还可以发电,做功发电二者相结合,同时进行,电机在发电的同时不影响电机正常工作,电机在做功时,不需要加大电压和电流,电机在发电时可以给充电器等储能设备充电。扭头机八层同时扭,每层单独伺服电机连接转动。
深圳金岷江设计生产的助力机械手按安装方式可分为:1、地面移动式助力机械手;2、墙壁固定式助力机械手;3、立柱式助力机械手(地面固定式);4、顶棚悬挂固定式助力机械手;5、移动导轨式助力机械手(也称高架行车式、高空悬挂式、天轨式)。按结构形式可分为两种:软索式助力机械手和硬臂式助力机械手按动力来源可分为:气动机械手、液压机械手、微电子机械手。助力机械手根据现场作业空间可以选择多种安装方式,便于达到**佳使用效果。1、结构:助力机械手主要由安装基础(安装方式)、主机和夹具组成;2、安装基础分为:参见以上深圳金岷江机械手安装方式;3、主机:主要由平衡气缸和刚性多关机悬臂组成,主要参数为起吊能力和服务半径,工作半径和提升行程可根据工件尺寸和现场要求来设定;4、夹具:一般根据客户提供的工件的外形尺寸来定制。夹具一般有(1)吊钩型;(2)抓取型;(3)卡紧型;(4)内涨型;(5)托举型;(6)夹持型;(7)夹持翻转型(翻转90°或者180°);(8)真空吸附性;(9)真空吸附翻转型(翻转90°或者180°)等方式。具体需要根据现场工件和环境来选择和研发设计,为您实现各种抓握、搬运、旋转、倾斜、放置等操作。主驱电机扁线焊接如何保证质量?蚌埠绿色环保主驱电机成本价
配备互锁装置,防呆防错装置,安全性高。广东自动主驱电机自动化产线
deg)这将会添加到“beta”相位角以获得U相中的电流的值。这可以通过空载磁链相位得到。Magnetflux(Wb)磁铁产生的线圈中磁链的大小。设置效率MAP图参数,即设置控制方式等相关参数。图16控制方式、参数设置界面[Title]:输入效率图的名称。输入的字符串显示在[ProjectManager]树中。[ResponseTable]:选择用于创建效率图的输出响应表。[InverterRating]:**适用于[SpeedPriority][MaxVoltage(V)]:输入逆变器母线电压(即下图中虚线包围的位置的电压),默认值为0V。当电动机的相电压的幅度是Vph时,对于星形连接的电动机,控制在×Vph≦Vmax的范围内。对于三角形连接,电动机控制在Vph≦Vmax的范围内。图17逆变器电路[MaxCurrent(A)]:输入从逆变器提供给电机的线电流的**大幅度。默认值是[ResponseTableCreation]对话框中**的输入电流的**大值。当电动机的相电流的幅度为Iph时,对于星形连接的电动机,被控制在Iph≦Imax的范围内。对于三角形连接,电机控制在Iph×≦Imax的范围内。[VoltageLimit][PeakVoltageAmplitude]:评估电压波形**大值是否达到极限。[FundamentalVoltageAmplitude]:评估电压的基波**大值(幅值)是否达到极限。推荐使用。广东自动主驱电机自动化产线
上一篇: 广西库存主驱电机特价
下一篇: 座椅电机装配成一体机