智能工装夹具技术指导
01夹模定义:用产品外形定位装夹的工具设计要点:1,此类夹模主要用于虎钳上,其长度可以根据需要截取;2,夹模上可以设计其他辅助定位装置,一般采用焊接方式连接夹模;3,模腔结构尺寸由具体情况确定;4,在动模上的适当位置紧配直径12的定位销,定模相应位置的定位孔滑动配合定位销;5,装配型腔在设计时需在无收缩的毛坯图档的外形面基础上偏移放大0.1mm。02钻孔、铣面工装设计要点:1,如有必要,可在固定芯及其固定板上设计一些辅助定位装置;2,实际情况需根据产品结构做相应设计;3,汽缸根据产品大小和加工时受力情况而定,常用SDA50X50;03数控、仪表夹头A数控夹头内束夹头设计要点:1,尺寸依据实际产品的内孔尺寸结构而定;2,与产品内孔定位接触的外圆在制作时需留单边0.5mm的余量,后来装到数控机床上在精车到尺寸,防止淬火过程导致的变形和偏心;3,装配部分的材料推荐使用弹簧钢,拉杆部分45#;4,拉杆部分的螺纹M20为常用螺纹,生产线防止作业员拿错零件的工装?智能工装夹具技术指导
工装夹具
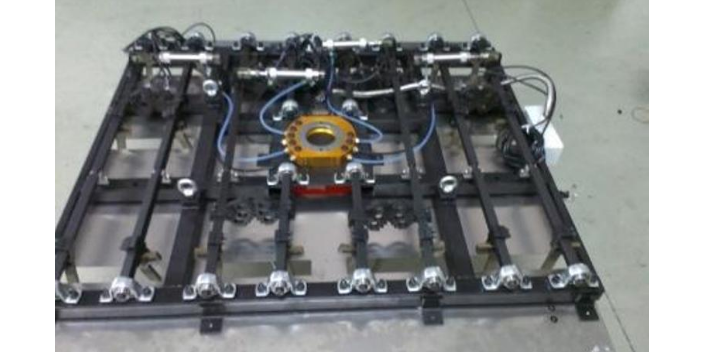
回转式工装夹具工位图工作原理为:加工前预先将工件置于准备工位夹具体的上面和侧面,下部卡在限位块上,当该工位旋转到回转挡铁一端入口,行程开关动作,对应的电磁换向阀通电,将压缩空气导入该工位的气缸,气缸连接杆向前推动压块夹紧工件,同时工件随着回转工作台旋转,被铣床主轴上的旋转铣刀切削。加工结束,该工位旋转到回转挡铁另一端出口时,行程开关断开,电磁换向阀换向,气缸后退至很小行程位置,工件被松开、取出夹具体。由此,八个工位上工件的交替运动,可以达到不停机自动夹紧与松开工件的铣削加工效果。智能工装夹具技术指导生产线装配工装夹具?
快速夹具:凸轮槽需要根据夹具的实际使用行程进行设计,同样,气缸行程也需根据实际需要选择。根据凸轮槽曲线的设计不同,也可以具有自锁功能。基本机构、基本结构的前提下做到举一反三,善于将这些基本知识和基本机构进行演化而使其在不同场合能得到适当的运用。不论多么复杂的设备,都是一些基本机构的叠加和综合运用的结果。比如,两种不同的气缸驱动的夹具也能通过适当的演化而得到几种不同形状和结构的抓手。当然,由于现在大多数气动产品厂商都能生产非常精致的手指气缸(气爪),所以在一般情况下我们不提倡舍易就难的使用直线气缸驱动复杂的机构去抓取产品
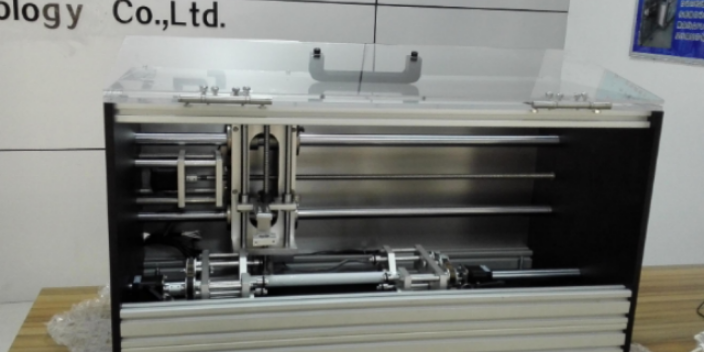
测试夹具是机械夹具中用于测试用途的一个夹具品类。测试夹具被多使用在产品的研发,生产和维修中。测试设备与被测件之间的连接无法人工操作需要在测试过程中快速完成连接操作,提高生产力需要自动化控制,实现无人值守,或大幅度减少操作员数量基于安全、精度和降低劳动强度的考虑测试夹具的分类ICT测试PCB电路连通性及元器件的连接性测试。用于发现由于制板或者焊接不良引起的产品性能不良。板级功能测试PCBA的板级功能测试。例如通讯、功率、风扇,电流电压以及其他产品性能,用于确认在PCBA装配到整机前的功能和性能检查。电子厂生产装配工装?
焊接机器人主要适用于批量标准件的生产,在提高生产效率和稳定产品质量方面的优越性较为突出。那么,焊接机器人的工装设计和工装的使用方法是什么呢?1、工装设计(1)工装总体高度要严格控制,原单轴变位机设计时充分考虑了工件旋转时的重心变化,涉及到伺服电动机功率选取。如果工件旋转时偏心严重,会导致伺服电动机过载;(2)工装需要有足够的承重能力,由于工装转台上要安装原有的两轮台车架夹具,所以此工装要有足够的承重能力来承受夹具、两轮台车架以及在变位机旋转过程中的偏心力矩;(3)安全方便的固定,在工件焊接过程中,工装转台不能旋转,必须有安全可靠、方便操作的固定装置。产品组装辅助工装哪里能定制?安阳工装夹具定制价格
仓库管理为了防错的系统?智能工装夹具技术指导
自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,机械臂进行焊装加工,带来的效率提升自然不言而喻。对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善,搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。1转接座2.夹具大底板3.气缸4.直线导轨5.气缸推杆6.工件夹紧块技术方案:车架机器人搬运焊接夹具,采用气动夹紧直线导轨导向方式,产品规格调整时,更换调整搬运夹具中气动插销和气动压板的位置,即可适应工件调整,满足多种规定尺寸内工件焊接的要求。智能工装夹具技术指导
上一篇: 郑州销售工装夹具
下一篇: 供应工装夹具服务至上