新能源工装夹具机械结构
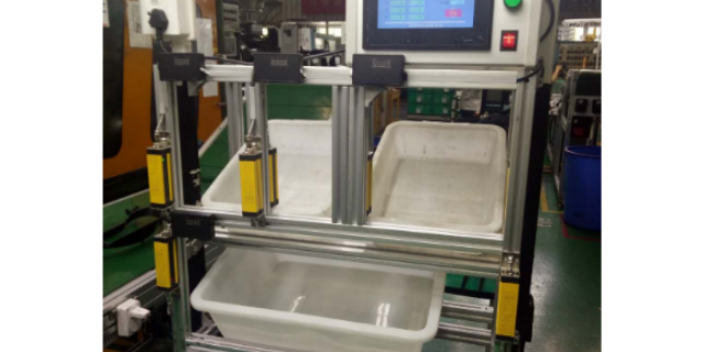
光栅是为了做到快速电气响应,减少安全距离,降低人员上件行走的路程而设定的,在空间、生产节拍充裕的情况下,为降低成本,光栅可以取消。B方案是为了解决工装夹具四周都有人员作业的安全防护。C方案中设计斜挡板是为预防人员进入到扫描仪无法扫描的区域;不使用斜挡板时,扫描检测费用较高。2.双机器人抓件防护方案某些工位存在两台机器人同时工作的情况,两台之中任一机器人进入上件区域,人员进入作业区域,机器人都会立即停止。典型机器人抓件防护上料台侧围栏高度不低于1000mm,隔离机器人的激光扫描仪与人机交互的安全距离建议大于500mm,若存在上料口左侧/右侧机器人进入工位抓件的情况,此时激光扫描仪下方的围栏高度在2000mm左右,激光扫描仪安装与人机交互的安全距离一般大于500mm。谁能做非标定制模具?新能源工装夹具机械结构
工装夹具
随着汽车生产规模的扩大、效率的提高和生产技术的提升,汽车生产线自动化和复杂程度也在不断增加,但高度发展集成的自动化也带来了大量的安全隐患,为此在自动化生产线控制系统中使用了大量电气安全器件。目前国内常见的做法是使用急停开关、安全门锁、安全光栅及安全扫描仪等进行电气防护。汽车焊装自动化生产线电气安全系统设计原则、典型电气安全防护标准方案进行描述作为参考,确保电气安全防护的完整性与合规性。保证生产人员的安全。节能工装夹具报价生产线组装产品用工装能定制吗?
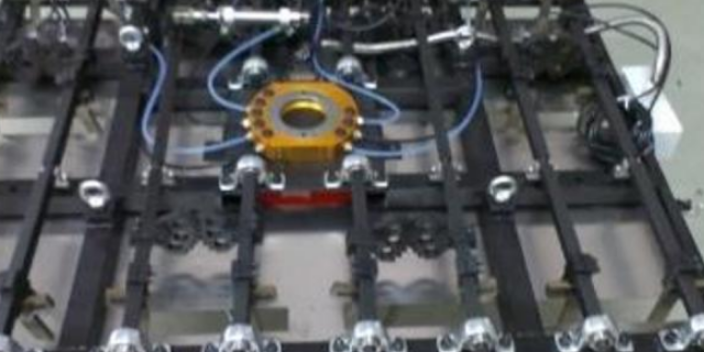
夹持组包括用于夹持异变形零件的两活塞,活塞正对且间隔设置;内设有供液压油流通推动活塞挤压异变形零件的支线油路。本体内设有连接外部油路的油路,主油路与支线油路密封连通。液压夹具1.零件3.夹具本体4.夹持组其中,本体为圆盘状结构、凹槽为对应于本体的柱状槽。本体的另一端向外凸出形成用于固定连接的圆柱。凹槽槽底的中心处凸出有定位圈。凹槽外沿端面上固定有呈对称布置的四夹持组。各夹持组通过紧固件与所述本体可拆卸固定连接。11.外圆柱12.固定脚31.凹槽32.主油路33.圆柱34.入油口35.定位圈技术效果用于异变形零件的液压夹具,针对异变形零件的结构特点而设计了多个夹持组,并将设于各个夹持组中的支线油路并入本体的非油路中进行统供油,再通过液压油同时推压各个夹持组中的活塞夹持零件,有效避免零件的装夹变形,确保了夹紧动作的便捷可靠,提高了装夹效率,同时结构简单使用方便。
回转式气动工装较传统的工装具有明显的优势:首要,对操作人员的操作技能要求明显下降;第二,零件装夹的安全性提升;第三,减少了操作人员的劳动强度;第四,改进后的加工效率较传统加工效率提高10倍以上;第五,设备的故障率减小。结语本设计夹具结构创新了铣削加工的批量生产方式,利用回转式工作平台替代直线型流水线生产,通过电气元件、电磁阀控制气缸动作,结构简单、装夹简易快捷。应用实际生产后,极大地提高了劳动生产效率,并且缩短了工件的生产周期。本设计思路也可以推广到其它机械加工设备,改变其加工设备的工艺水平。生产中防错工装哪里有?
自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,车身就同时使用了多个机械臂进行焊装加工,带来的效率提升自然不言而喻。对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善。一、搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。技术方案:车架机器人搬运焊接夹具,采用气动夹紧直线导轨导向方式,产品规格调整时,更换调整搬运夹具中气动插销和气动压板的位置,即可适应工件调整,满足多种规定尺寸内工件焊接的要求。机器人抓手工装设计?智能工装夹具比较价格
机器人配套设备哪里定制?新能源工装夹具机械结构
自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,机械臂进行焊装加工,带来的效率提升自然不言而喻。对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善,搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。1转接座2.夹具大底板3.气缸4.直线导轨5.气缸推杆6.工件夹紧块技术方案:车架机器人搬运焊接夹具,采用气动夹紧直线导轨导向方式,产品规格调整时,更换调整搬运夹具中气动插销和气动压板的位置,即可适应工件调整,满足多种规定尺寸内工件焊接的要求。新能源工装夹具机械结构
上一篇: 直销工装夹具定制价格
下一篇: 购买工装夹具规格