自动工装夹具诚信互利
在人工焊接越来越被焊接机器人取代的时候,焊接机器人的工装夹具也在自动化焊接方面运用的越来越多。目前在焊接车间中基本上都是使用机器人进行生产,焊接机器人焊接出来的产品焊缝一致,非常美观。那大家知道机器人焊接工装夹具与普通焊接夹具的区别是什么吗?1、机器人焊接工装夹具前后工序的定位须一致。2、与普通焊接夹具不同,机器人焊接工装夹具除正面可以施焊外,其侧面也能够对工件进行焊接,可以无限延伸。3、对零件的定位精度要求更高,焊缝相对位置精度较高。4、机器人焊接工装夹具应尽量采用快速压紧件,且需配置带孔平台。以便将压紧快速装夹压紧。5、由于焊件一般由多个简单零件组焊而成,而这些零件的装配和定位焊,在焊接工装夹具上是按顺序进行的,所以,它们的定位和夹紧是一个个单独进行的。6、由于变位机的变位角度较大,机器人焊接工装夹具尽量避免使用活动手动插销。汽车厂生产组装工装?自动工装夹具诚信互利
工装夹具
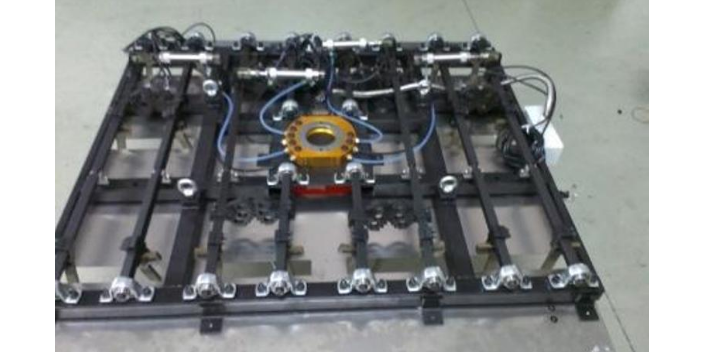
自动化趋势背景下,很多结构工件的焊接加工等工作都利用机器人或者机械臂来完成,车身就同时使用了多个机械臂进行焊装加工,带来的效率提升自然不言而喻。对于企业来说有面临由手工向自动化焊接转型的需要,或者是现有的自动焊接方式不够完善。一、搬运车车架机器人自动焊接夹具针对问题:目前对搬运车车架的焊接与搬运主要采用手工焊接和人工搬运为主。而现有的手工搬运对于自动化焊接存在诸多不足,已越来越不适应行业的发展,严重影响焊接质量和生产效率。技术方案:车架机器人搬运焊接夹具,采用气动夹紧直线导轨导向方式,产品规格调整时,更换调整搬运夹具中气动插销和气动压板的位置,即可适应工件调整,满足多种规定尺寸内工件焊接的要求。自制工装夹具供应商家仓库管理为了防错的系统?
激光扫描仪区域需有清晰的地面标记,当人机交互时,触发扫描仪需立即停止所有的运动设备。区域安全门应设计请求停止按钮,在打开安全门前,请求停止设备,在设备稳定运行停止后,再打开门,以降低对设备的伤害;在没有请求停止时安全门打开,区域内所有设备立即停止;安全门必须关门后才允许复位起动。典型电气安全防护元件1.安全光幕安全光幕也就是光电安全保护装置(也称安全保护器、红外线安全保护装置),以保护人体为目的,具有检测导致危险产生的功能。2.激光扫描仪激光扫描仪是用扫描技术来测量工件区域及形状的一种仪器,内部采用稳定度和精度良好的旋转电动机。
4,设计时需考虑产品的定位方向,防止内漏的气体憋在产品型腔内部而误检的情况出现。05冲孔工装设计要点:底板作用为方便固定在冲床的工作台;定位块作用为固定产品,具体结构按产品的实际情况而设计,中心点围绕能方便安全的取放产品;挡板作用在方便产品从冲刀上脱离;支柱起固定挡板的作用。上述几个部位的装配位置和尺寸可按产品的实际情况设计。06焊接工装焊接工装主要起固定焊接组件中各零部件的位置,控制焊接组件中各零部件的相对尺寸,其结构主要是定位块,需根据产品的实际结构来设计。值得注意的情况在产品放置在焊接工装上不得用工装之间产生密封空间,防止焊接加热过程中导致密封空间压力过大影响零部件焊接后的尺寸。谁可以帮忙设计组装工装夹具?
主线区域系统防错,主线区域系统防错①侧围与下车型匹配UB10发送车型信息,侧围通过EMS小车传递车型信息与下车体匹配);②侧围下线工位将侧围抓取至EMS小车,同步将侧围配置信息通过RFID读取码,写入EMS小车载码体上;③EMS小车输送侧围至主线合拼工位,总拼工位读码,根据下部车型配置信息,读取侧围总成是否与下部车型配置匹配;④侧围匹配一致后,进行装配焊接,若不匹配,小车放行不一致的侧围,直至匹配到一致的侧围进行装配。镜片贴胶带工装定制?定制工装夹具基础
防错装配工作台谁可以做?自动工装夹具诚信互利
夹具是机床切削加工的重要工艺装备,使用夹具的首要目的是保证机械零件尺寸(形状)精度及位置精度,而机械零件的制造精度很大程度上取决于,加工该零件的机床夹具能否到达夹具设计精度的要求。目前生产企业夹具制造精度的保证方法绝大多数依然采用装配调整法,这种夹具制造过程像普通机械制造那样,先按零件图制造出所有零件然后组装,很终夹具精度是靠设法调整或修磨某个元件位置或尺寸来实现。而从夹具设计制造实践来看,这样方法很难满足夹具装配图提出的各种尺寸及形位公差要求。介绍一种保证夹具制造精度的特殊工艺方法—装配加工法。适用于该加工方式的钻模夹具一、什么是装配加工法装配加工法在夹具制造工艺方面上明显有别于装配调整法,其基本原理是,将夹具作为一个整体对待,对有位置精度要求的导向结构或定位结构,安排在夹具组装后进行加工,以比较大限度地减少各元件之间的累积误差,提高夹具制造精度。自动工装夹具诚信互利