节能工装夹具认真负责
在人工焊接越来越被焊接机器人取代的时候,焊接机器人的工装夹具也在自动化焊接方面运用的越来越多。目前在焊接车间中基本上都是使用机器人进行生产,焊接机器人焊接出来的产品焊缝一致,非常美观。那大家知道机器人焊接工装夹具与普通焊接夹具的区别是什么吗?1、机器人焊接工装夹具前后工序的定位须一致。2、与普通焊接夹具不同,机器人焊接工装夹具除正面可以施焊外,其侧面也能够对工件进行焊接,可以无限延伸。3、对零件的定位精度要求更高,焊缝相对位置精度较高。4、机器人焊接工装夹具应尽量采用快速压紧件,且需配置带孔平台。以便将压紧快速装夹压紧。5、由于焊件一般由多个简单零件组焊而成,而这些零件的装配和定位焊,在焊接工装夹具上是按顺序进行的,所以,它们的定位和夹紧是一个个单独进行的。6、由于变位机的变位角度较大,机器人焊接工装夹具尽量避免使用活动手动插销。电子厂零件组装工装?节能工装夹具认真负责
工装夹具
快速夹具是利用机构的死点进行自锁的夹紧装置,在现代工厂中使用非常多。它通常被使用在半自动设备或全自动设备中对被加工产品或者产品的夹具进行夹紧。此类夹具依靠机构的死点自锁。在工装夹具的设计中,这种利用机构死点进行自锁的原理得到非常多的应用,应该仔细研究。依照这种机构的设计方式,我们可以很轻松的对此略加演化,加上气缸实现快速夹具的自动夹紧、松开操作。这也是气缸在快速夹具中使用的典型范例。还可以通过改变夹紧工作头的机构来实现不同方向的快速夹紧。另外,也可以通过槽凸轮的形锁合结构来实现自动快速夹紧的功能。工装夹具厂家直销生产中防错工装哪里有?
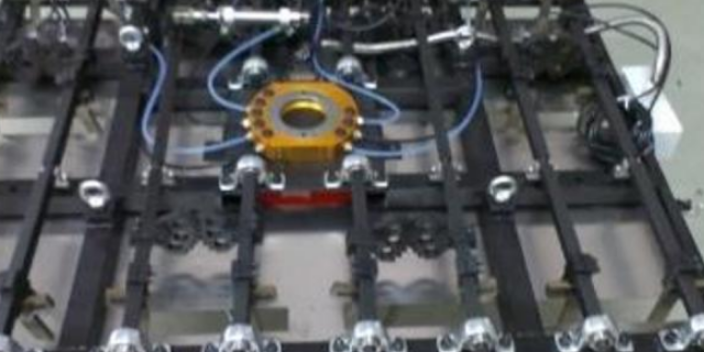
工装使用方法(1)将工装各个部分按照图样要求装配好,机器人原厂夹具底部的轴插入工装后,将轴端挡圈安装好。然后将组装好的工装夹具用原厂配置的螺栓固定在变位机托架上;(2)将组装点焊好的两轮台车架固定在机器人夹具上,由示教人员进行示教编程;(3)松开固定销,将夹具旋转180°后用固定销重新固定,由示教人员进行示教编程;(4)使用机器人原厂的变位机将托架旋转180°,由示教人员进行示教编程。为了提高国家的工业发展水平,就需要提升工业加工技术,提高产品质量和企业竞争力,而焊接机器人的出现就体现了一个国家工业技术的加工工艺。
焊装防错焊装防错的工艺开发流程有6个阶段(图1),包括:焊装工艺策划防错、焊装工艺分析防错、焊装工艺设计、焊装设备工装开发,焊装工艺验证、焊装工艺优化及维护。焊装防错工艺开发流程的前4个阶段。焊装工艺开发流程六个阶段防错1.焊装工艺策划防错焊装工艺策划阶段的防错,首先需将防错Checklist导入设计,然后根据类别对零部件进行分类管控,分别采取不同的技术策略。(1)相像(高难度识别):零部件结构相似,局部型面有变化,即使放在一起也难以识别,只能通过检具或三坐标识别;(2)相似(难识别):结构有不同,差异较小,不放在一起无法识别;(3)相近(易错装):零部件虽在结构、大小上有不同,但差异较小,有识别特征,但不明显,不能快速、清晰识别,容易混淆。机器人工装夹具哪家做?

焊接机器人主要适用于批量标准件的生产,在提高生产效率和稳定产品质量方面的优越性较为突出。那么,焊接机器人的工装设计和工装的使用方法是什么呢?1、工装设计(1)工装总体高度要严格控制,原单轴变位机设计时充分考虑了工件旋转时的重心变化,涉及到伺服电动机功率选取。如果工件旋转时偏心严重,会导致伺服电动机过载;(2)工装需要有足够的承重能力,由于工装转台上要安装原有的两轮台车架夹具,所以此工装要有足够的承重能力来承受夹具、两轮台车架以及在变位机旋转过程中的偏心力矩;(3)安全方便的固定,在工件焊接过程中,工装转台不能旋转,必须有安全可靠、方便操作的固定装置。产品组装辅助工装哪里能定制?制造工装夹具出厂价
谁能做生产工装夹具?节能工装夹具认真负责
工装线链板输送机运输,所传递的物体不能超过运输机的大负荷。在进程中产生任何意外,应当终止机器的运作,并对链板输送机进行检查,直到消除了意外因素后,才干连续进行工作。转弯机多用于食品、罐头、饮料、化妆品和洗涤用品、纸制品、调味品、乳业的自动输送、分配、和后道包装的连线输送。为了预防不必要的事变,应清理输送机,坚持链条的整洁跟保险。工装线链板输送机技巧收拾宣布。输送设备框架的下料与焊接,要由工装与工具尺来保证尺寸及角度的准确性,同时输送跑道的平整性与牢固性,影响着输送线的稳定性。节能工装夹具认真负责
上一篇: 什么工装夹具承诺守信
下一篇: 销售工装夹具批量定制