江苏工程工装夹具
07抛光治具08装配工装装配工装主要应用在组件的装配过程中辅助定位的装置。其设计思路为根据组件装配的结构能便捷的取放产品,在装配过程中不能损坏产品的外观表面,在使用过程中能盖上棉布来保护产品。在材料的选用上面尽量用白胶等非金属材料。09移印,激光刻字工装设计要点:根据产品实际情况的刻字要求来设计工装的定位结构,需注意产品取放的便捷性,和产品外观的保护,定位块和与产品接触的辅助定位装置尽量采用白胶等非金属材料。镜片组装工装夹具定制?江苏工程工装夹具
工装夹具
安全防护系统设计原则如图1所示,人工上件工位配置可以按不同的工艺上件方案选配,组合安全光幕和激光扫描仪,同时结合安全围栏等物理隔离效果,保障人员上件安全。电气安全防护系统人工上料口与机器人轨迹直接交互时,需配置安全光幕或激光扫描仪进行人机检测防护,当机器人进入人机交互区,安全光幕被触发时,机器人工作区域设备应立即停止。安全门安装在距离机器人或其他设备至少500mm处。急停要能够触发停止所有安全区域的运动设备,急停的复位设计,采用“谁急停谁复位”原则,不允许在其他操作站上的复位按钮能够复位当前操作站上的急停。工程工装夹具哪家强防止人员出错的装配台?

光栅是为了做到快速电气响应,减少安全距离,降低人员上件行走的路程而设定的,在空间、生产节拍充裕的情况下,为降低成本,光栅可以取消。B方案是为了解决工装夹具四周都有人员作业的安全防护。C方案中设计斜挡板是为预防人员进入到扫描仪无法扫描的区域;不使用斜挡板时,扫描检测费用较高。2.双机器人抓件防护方案某些工位存在两台机器人同时工作的情况,两台之中任一机器人进入上件区域,人员进入作业区域,机器人都会立即停止。典型机器人抓件防护上料台侧围栏高度不低于1000mm,隔离机器人的激光扫描仪与人机交互的安全距离建议大于500mm,若存在上料口左侧/右侧机器人进入工位抓件的情况,此时激光扫描仪下方的围栏高度在2000mm左右,激光扫描仪安装与人机交互的安全距离一般大于500mm。
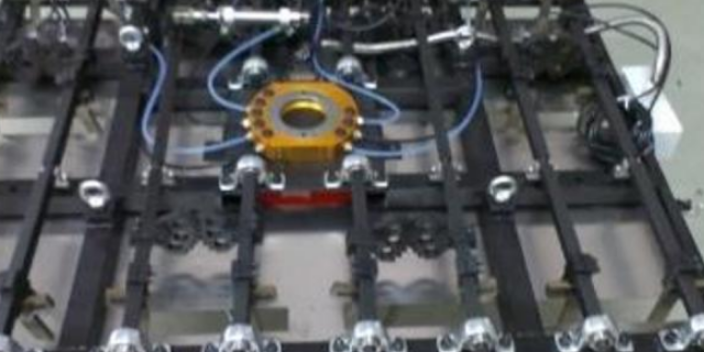
夹持组包括用于夹持异变形零件的两活塞,活塞正对且间隔设置;内设有供液压油流通推动活塞挤压异变形零件的支线油路。本体内设有连接外部油路的油路,主油路与支线油路密封连通。液压夹具1.零件3.夹具本体4.夹持组其中,本体为圆盘状结构、凹槽为对应于本体的柱状槽。本体的另一端向外凸出形成用于固定连接的圆柱。凹槽槽底的中心处凸出有定位圈。凹槽外沿端面上固定有呈对称布置的四夹持组。各夹持组通过紧固件与所述本体可拆卸固定连接。11.外圆柱12.固定脚31.凹槽32.主油路33.圆柱34.入油口35.定位圈技术效果用于异变形零件的液压夹具,针对异变形零件的结构特点而设计了多个夹持组,并将设于各个夹持组中的支线油路并入本体的非油路中进行统供油,再通过液压油同时推压各个夹持组中的活塞夹持零件,有效避免零件的装夹变形,确保了夹紧动作的便捷可靠,提高了装夹效率,同时结构简单使用方便。智能仓储系统哪家能做?
在现代工厂自动化设备中,夹具始终是设备的一个重要组成部分,其重要作用不言而喻。任何产品的加工、装配都离不开装夹、定位。而气缸则由于其本身的特点和优势——以非常简单的方式实现直线往复运动功能,而且其控制方法非常简单,这也就成为各设计师通常优先其作为自动夹具驱动器件的理由。当然,需要指出:自动夹具的驱动也并不仅由气缸驱动,很多场合也使用液压缸和电机驱动。因此,其在夹具中的使用也就成为其使用领域的重头戏之一。由于其在各种装夹场合的使用非常多,结构形式变化多端,产品组装辅助工装哪里能定制?现代工装夹具来电咨询
定制线圈模具非标定制?江苏工程工装夹具
.焊装工艺设计(1)零部件RPS点设计防错零件RPS设计要在零件模具、检具开发设计之前考虑零件搭接关系,尺寸控制重点部位,合理设计零件定位,避免车身精度受零件转配累计尺寸偏差影响。(2)夹具MCP设计防错夹具MCP设计在夹具开发前期阶段应考虑每个零件定位防错要求。(3)车型布置规划防错焊装产线布置规划要从产线区域布置,考虑零部件的上线防错顺序。4.焊装设备工装开发(1)手工线设备工装防错手工线设备工装防错主要考虑手工夹具防错、零件防错、焊接设备防错。其中夹具定位设计不仅要满足MCP要求,还要满足对相似件差异部位做定位设计。江苏工程工装夹具
上一篇: 江苏工装夹具技术参数
下一篇: 本地工装夹具私人定做