黄浦区激光位移传感器技术指导
系统的整体结构如图1所示。从图1可以看出,整个系统由上位机、激光位移传感器和平台运动控制系统三部分组成。激光位移传感器由激光位移控制器、感测头和监视器组成。平台运动控制系统主要由平移台运动控制器、驱动器、电源和二维电动平移台组成。系统的部分设备如图2所示。图2列出了激光位移传感器感测头和二维电动平移台。图3为激光位移传感器感测头测量对象物原理。参考距离根据被测对象物的变化可测量范围为2 mm,基准距离为30 mm,传感器显示解析度为0.3μm,线性度达到满量程的0.3%,即精度达到6μm。高精度激光位移传感器还可以用于科学研究和实验室应用。黄浦区激光位移传感器技术指导

为克服由于前述各种因素导致激光位移传感器像面上的像点光斑不对称现象对位移检测产生的影响,目前本技术领域采用的做法大致有以下几种情况:采用抗饱和芯片,用以消除芯片饱和产生的拖尾现象,但该方法还无法减小被测物体表面因反射不均匀或因粗糙度不均匀而引起的检测误差;在工业检测中根据不同的被测物体表面反射情况,按照其产生的有规律的不同形状的光斑,采用不同的数据处理方法提高检测精度,这对工作场合稳定、被测物体表面有规律的情况是完全可以的,但对被测表面反射情况事先无法知道的道路检测方面,同样还存在由于光斑不对称产生的测量误差;杨浦区激光位移传感器品牌企业高精度激光位移传感器的响应速度非常快,能够实时监测目标物体的位移变化。
提高采样频率,利用前一次采样得到的结果,分析判断物体表面的反射光强,然后适时调整激光器发射的激光束的强度,以减小由于反射光强变化大而产生的测量误差。这种方法在很大限度上改进了由于饱和产生的误差,但仍然无法从根本上解决由于物体表面在激光光斑散射的小范围内的反射率不同以及由于存在表面颗粒变化导致成像光斑不对称等因素产生的测量误差。本实用新型的目的在于对现有技术存在的问题加以解决,提供一种结构合理、使用方便、可减小甚至消除路面检测过程中由于成像光斑不均匀或不对称产生的测量误差,进而有效提高位移检测精度的道路检测激光位移传感器。
针对目前国内自主研制的激光位移传感器精度低,测量范围小等问题,提出了一种采用光学设计软件预先仿真整个激光位移传感器光学系统的方法。在分析系统各部分的光学特性的基础上,结合具体要求设计了一个激光位移传感器的光学系统,其工作范围为(50±10)mm。采用系统分割的方法,将整个光学系统分为两部分进行设计,No.1部分是激光束的整形透镜,要求在有效的工作范围内得到小而均匀的出射光斑,设计结果表明,在测量范围内,光斑大小能够控 制在10-1mm量级;另一部分是被测面散射光接收的成像物镜,该系统的特点是物面和像面相对于光轴都有一定的角度,实验结果表明其成像满足Scheimpflug条件。 这种传感器还可以用于测量建筑物的结构变形,以确保其安全性。
根据权利要求1所述的激光位移传感器,其特征在于,在进行解析时,空间频率为62.5lp/mm,如果所述多个感光单元的主要排列方向为弧矢方向,则MTFS≥0.5,MTFT<0.05;如果所述多个感光单元的主要排列方向为弧矢方向,则MTFT≥0.5,MTFS<0.05。4.根据权利要求1所述的激光位移传感器,其特征在于,进一步包括:反光元件,所述反光元件设置在所述成像物镜的出射光路上,所述成像物镜的出射光经所述反光元件反射后,入射到所述感光元件。5.根据权利要求1所述的激光位移传感器,其特征在于,进一步包括:带通滤光片,设置于所述成像物镜的入射光路上。6.根据权利要求1所述的激光位移传感器,其特征在于,进一步包括:聚焦透镜,设置于所述激光器的出射光路上。7.根据权利要求1至6中任一项所述的激光位移传感器,其特征在于,所述感光元件为线阵感光元件,所述线阵感光元件的多个感光单元沿直线排列,该直线的延伸方向为所述多个感光单元的主要排列方向。在工业领域,激光位移传感器可以用于检测零件的尺寸和位置,以确保生产过程的准确性和一致性。南京激光位移传感器
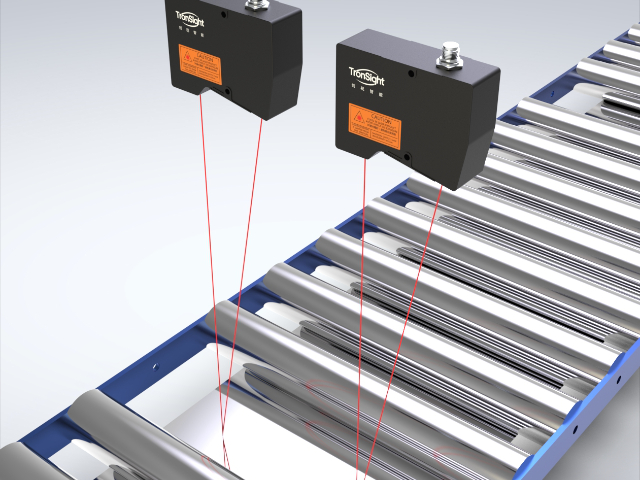
激光位移传感器在市政检测行业的应用案例。黄浦区激光位移传感器技术指导
从图2的镜头图可以看出,第二块透镜的半径很小,主要是为了保证系统在整个工作范围内得到相对均匀的光斑。表1给出了在工作范围内光斑的直径大小,maximum为0.4mm,在靠近透镜的一边,minimun为0.08mm,在55mm处。由于成像系统的入射光是整形部分光经过物体散射回去的,因此整形系统得到的光斑不能太小;同时为了保证精度要求,光斑也不能太大,上面的结果能够满足需求。得到好的出射光斑以后,如何接收物体表面的散射光并使其精确成像,是确保激光位移传感器精度的关键问题。在直入射式三角法测量中,物体沿激光入射方向移动,物面并不垂直于成像光轴。那么在透镜成像过程中(如图1),由几何成像公式可证明: tanα/tanβ=d1/d',即为理想成像的Scheimpflug条件[5]。要想达到理想的成像效果,光电探测器需依此条件放置。黄浦区激光位移传感器技术指导
上一篇: 湖州光谱共焦位移传感器按需定制
下一篇: 哪些光谱共焦位移传感器技术指导