赣州激光位移传感器找哪家
系统的整体结构如图1所示。从图1可以看出,整个系统由上位机、激光位移传感器和平台运动控制系统三部分组成。激光位移传感器由激光位移控制器、感测头和监视器组成。平台运动控制系统主要由平移台运动控制器、驱动器、电源和二维电动平移台组成。系统的部分设备如图2所示。图2列出了激光位移传感器感测头和二维电动平移台。图3为激光位移传感器感测头测量对象物原理。参考距离根据被测对象物的变化可测量范围为2 mm,基准距离为30 mm,传感器显示解析度为0.3μm,线性度达到满量程的0.3%,即精度达到6μm。它可以实时测量物体的位移,并提供高精度的测量结果。赣州激光位移传感器找哪家
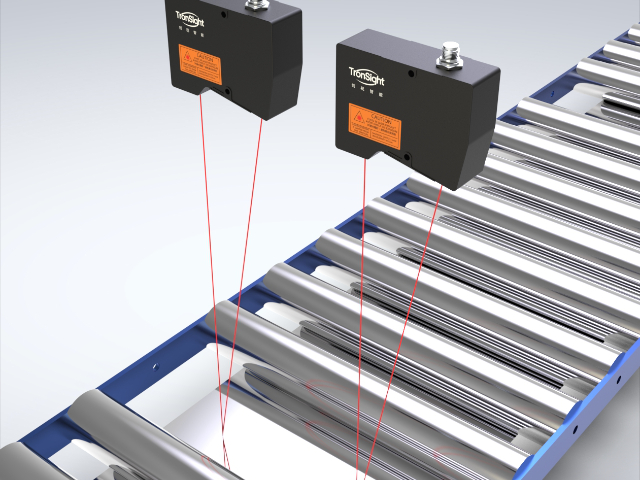
传统的接触式平面检测精度低、稳定性差及对对象物检测条件要求苛刻,已逐渐被现代非接触式平面检测所替代。非接触式激光平面检测系统以其高精度、高分辨率及不受对象物材质、颜色或倾斜度的影响等优点,可对任何对象物进行平面检测。介绍系统结构和激光位移传感器的工作机理,并进行平面定性检测和定量检测试验,用OpenGI。绘制及拟合三维曲面。试验结果表明,该系统平面检测结果较好地反映出对象物平面起伏情况,并且达到系统的精度要求。杭州激光位移传感器设备生产激光位移传感器的优势是什么呢?

带通滤光片,设置于成像物镜的入射光路上。聚焦透镜,设置于激光器的出射光路上。可选地,上述感光元件为线阵感光元件,线阵感光元件的多个感光单元沿直线排列,该直线的延伸方向为多个感光单元的主要排列方向。上述也可以是感光元件为面阵感光元件,面阵感光元件包括以矩形排列的多个感光单元,面阵感光元件的长边延伸方向为多个感光单元的主要排列方向。此外,上述成像物镜可以为单一镜片,且成像物镜的物侧面和像侧面皆为非球面;或者,成像物镜为多个透镜组成的透镜组。
在感光元件的多个感光单元的主要排列方向为子弧矢向的情况下,成像物镜本身的MTFS>MTFT、或者在感光元件的多个感光单元的主要排列方向为子午方向的情况下,成像物镜本身的MTFT>MTFS,使得解析结果满足条件;和/或在成像物镜前和/或在成像物镜后加入能够引入像散的光学元器件,并且配合微调所述成像物镜与所述感光元件之间的相对距离使得解析结果满足条件。反光元件,反光元件设置在成像物镜的出射光路上,成像物镜的出射光经反光元件反射后,入射到感光元件。激光技术的应用使得这种传感器具有高分辨率和高灵敏度,能够满足各种精密测量需求。

针对相关技术中的问题,本发明提出一种激光位移传感器,能够在不影响测量精度的情况下,降低成像物镜的设计难度,同时让测量系统能够更有效地应对振动、机械变形等不良影响。根据本发明,提供了一种激光位移传感器。根据本发明的激光位移传感器包括激光器、成像物镜以及感光元件,激光器用于射出激光束,由成像物镜接收并出射的光入射到感光元件。其中,在对成像物镜和感光元件CN1 06855391B3进行调制传递函数MTF解析时,解析结果满足以下条件:[0011]在感光元件的多个感光单元的主要排列方向为弧矢方向的情况下,MTFS>MTFT;在感光元件的多个感光单元的主要排列方向为子午方向的情况下,MTFT>MTFS;其中,MTFS为弧矢方向上的MTF值,MTFT为子午方向上的MTF值。进一步地,在进行解析时,空间频率为62.5lp/mm,如果多个感光单元的主要排列方向为弧矢方向,则MTFS>MTFT×10;如果多个感光单元的主要排列方向为子午方向,则MTFT>MTFS×10。[0015]可选地,空间频率为62.5lp/mm,如果多个感光单元的主要排列方向为弧矢方向,则MTFS≥0.5,MTFT<0.05;如果多个感光单元的主要排列方向为子午方向,则MTFT≥0.5,MTFS<0.05。激光位移传感器在3C电子行业中的应用案例。黄浦区激光位移传感器技术指导
高精度激光位移传感器的可靠性和稳定性也是其优点之一。赣州激光位移传感器找哪家
一种激光位移传感器检验校准装置,其特征在于:包括一可伸缩导轨、一微调装置、一传感器夹持装置、一激光位移传感器以及一激光红外线接收挡板;所述微调装置和传感器夹持装置设于所述可伸缩导轨的上端;所述激光位移传感器夹持在所述传感器夹持装置上,且使所述激光位移传感器的激光发射端朝向所述微调装置;所述激光红外线接收挡板与所述微调装置固接,且使所述激光红外线接收挡板的接收面朝向所述传感器夹持装置。啊啊啊啊啊啊啊赣州激光位移传感器找哪家
上一篇: 设备光谱共焦位移传感器欢迎选购
下一篇: 赣州激光位移传感器品牌企业