北京桌面式4轴机器人

SCARA的特点如果要用三个字来概括就是“快”、“准”、“稳”。“快”则主要体现在标准循环时间上。在过去,行业内主流的机器人公司都约定俗成将机器人标准循环时间作为衡量机器人性能的重要指标,指的是用机器人将负载2kg的物体提升25mm的高度,在相距300mm的两点间拱形路径下往返所需的时间,也有超小型机器人(负载1Kg以下,臂展R400以下)的产品将标准定义为0.1kg、0.5kg或1kg负载,25-100-25的拱形路径下的循环时间,但一般都以秒(S)为单位,这一指标体现了机器人的运行速度和加速度性能。上海4轴机器人便宜通用性强 ,应用领域广,均可适用于各类行业领域的搬运,如热锻、冲压上下料行业;

四轴机器人优势特点:1、运行速度快: 200mm-1700mm-200mm门型循环节拍3.5s(添加模拟取放料信号交互点)冲压节拍可高达16次/分,有效提升生产效率。 2、运动范围大 :工作半径可达1510mm,可轻松应用于冲床中心距3m的冲压场合,预留间隔空间,加大换模区域,提升模具更换效率。 3、便捷维护 : 机器人结构简单,采用模块化部件结构,组合式减速机构,故障维修难度低,可快速故障处理立即恢复生产; 4、高可靠性 :采用高性能**零部件,稳定性高,故障率低,为整机提供高可靠性能保证,可长时间持续执行生产任务; 5、通用性强: 应用领域广,均可适用于各类行业领域的搬运,如热锻、冲压上下料行业; 6、拓展性强: 可根据实际生产需要,灵活布置和调整生产连线方式,满足单站生产、多台联机等多种生产方式,可快速实现柔性化生产及后续方案设计升级。
HSR-MD410码垛机器人有效负载10kg,重复定位精度±0.08mm,工作半径1510mm,能有效满足码垛、拆垛、冲压等工艺过程对机器人高精度定位与自我调节的需求。值得一提的是,针对冲压领域,该机器人应用不受数量限制,调试、切换简单,换模具时只需换掉区配的夹具即可,生产方案可采用同步联机及异步联机设计,能规避随时切换模具等因素造成全部停机现象。华数机器人已成功推出了BR双旋、垂直多关节、水平多关节、SCARA、Delta、特殊系列的六大系列、40余款工业机器人整机产品,广泛应用于3C电子、厨卫、五金、汽摩和鞋服等行业,已成功进入苹果、惠普、联想等供应体系。在制造行业中,有多种用途的机器人参与生产,为企业带来了更多的效益和便捷,常见的是四轴和六轴机器人。
HSR-SR20800机器人是专门针对高速大负载的应用场景开发的机器人,有800和1000两种不同的臂长。依托多年伺服控制的技术积累,使用自主研发的控制技术,巧妙地运用伺服电机的性能,在高转矩工况下可带20Kg负载。具有高速度、高刚性、运动灵活和稳定性高的优势。适用于电子产品行业、新能源、玻璃面板,PCB等领域。产品特性:一、高速高刚性出色的加/减速度,匹配平稳的启动/停止时间全系采用RV减速机,保证关节刚性和高效率,同时调整惯量比,提高机器人的动态响应性;更大容许惯性力矩,适合更大偏心的负载高速搬运二、易使用丰富的用户接头,本体走线内部集成了用户信号线接头,视觉网线接头,保证了用户夹具及视觉安装的便捷性,两个φ6和两个φ8的气管接头,很好的满足了用户的使用需求;3轴丝杆中空设计,用户气管可直通底部,安装吸盘即可实现拾取;轻松拖曳即可推动机器人进行示教,定位记录更加准确方便三、行业应用适用于:医疗药品、实验室自动化、消费类产品、工业产品、电信、制药、包装、半导体、电子等行业领域。3C、新能源等新兴行业的需求越来越大,促使SCARA机器人在电子制造等轻小型消费品制造领域销量持续上升。广州4轴机器人供应商
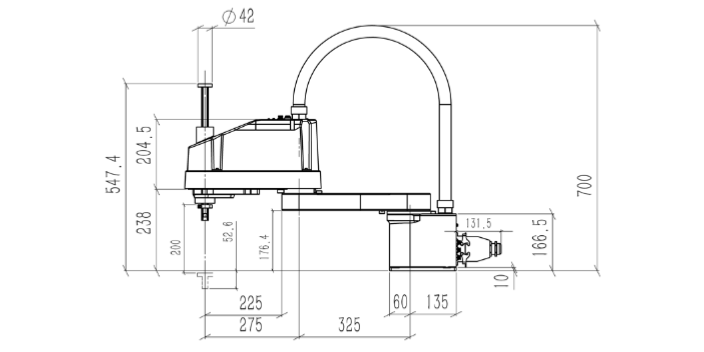
华数HSR-HC403机器人可满足正装、倒装、侧挂等多样性安装方式,高度灵活性满足不同作业场景需求。北京桌面式4轴机器人
协作机器人是一种设计和人类在共同工作空间中能进行近距离互动的机器人,能够与人类在同一工作环境中并肩协同作业的新型工业机器人。为人机互动提供了安全保障,在构造和性能上兼具了人和机器各自的优点,尤其体现了人的灵活性和适应性。其结构主要采用一体化关节模组结构,实现模块化关节设计。一体化关节结构集成了谐波减速器、中空电机、刹车装置、编码器等,利用中空电机驱动中空电机轴转动,经由谐波减速器减速后,输出动力。北京桌面式4轴机器人