Posital FRABA智能化磁致伸缩位移传感器接线
磁致伸缩位移传感器
产品特点
1.内部非接触式测量;
2.性能价格比高;
3.多种输出方式可供选择;
4.防浪涌、防射频干扰;
5.安装方便;
6.高精度、高稳定性、高可靠性;
7.使用寿命长;
8.具有输入电源反向极性保护功能;
9.结构精巧、环境适应性强;
10.隔离防爆型(可选);
11.不需定期标定和维护。
应用领域
可广泛应用于石油、化工、水利、制药、食品、饮料等行业的各种液罐的液位计量和控制,航天加油系统、汽车加油系统、柴油加油系统及各种液压罐、水文监测、水处理等。
开地电子提供兰州地区磁致伸缩位移传感器,***产品,非线性校正、高稳定长寿命,你值得拥有。Posital FRABA智能化磁致伸缩位移传感器接线
磁致伸缩位移传感器 应用编辑
随着国内风力发电机组的制造水平的不断提高,液压变桨系统凭借其在性能、环境适应能力、维护成本等方面的优势,必将得以广泛应用。机械盘式刹车锁紧销方面,磁致伸缩线性位移传感器的应用提高了锁紧销动作的可靠性,进而提高了整机运行的安全性。
通过位移传感器来进行监测锁紧销的动作是否可靠到位,所以在大多数的机械盘式刹车系统上的锁紧销都需要安装位置传感器。
磁致伸缩位移传感器适用于高温、高压和强振荡等极其恶劣的工况,其***式输出很好地解决了断电归零问题,由于敏感元件都是非接触式、无磨损运行,平均无故障时间长达23年。 Posital FRABA智能化磁致伸缩位移传感器接线开地电子提供西安地区磁致伸缩位移传感器,***产品,非线性校正、高稳定长寿命,你值得拥有。

磁致伸缩位移传感器
CARLEN为原装进口德国产品, 17系列磁悬浮式磁致伸缩位移传感器是专为油压缸而设计,耐压外管与六角法兰为100%不锈钢制作,可以直接安装到液压缸内。电子仓部分与耐压外管为模块化设计,即两者可完全分离开。
此设计为在特殊情况下只需拔出电子部分,而耐压外管(不锈钢管)无需和液压缸分离,更无需对液压缸内的油进行放油清空操作,此设计较大提高生产效率,减少重置液压缸的时间。
非接触式设计不但方便安装,而且能消除所有工作磨损而带来的误差。
磁致伸缩位移传感器
技术参数编辑
1.测量对象:位置、速度(***速度),可测量1~2个位置
2.测量范围:50 mm~8000mm
3.零点可调范围:100%F.S
4.输出方式:
电流:4~20mA,最大负载电阻 600Ω
电压:0~10VDC 0~5VDC,比较低负载>5KΩ
5.精 度:
分辨率:采用 16Bit D/A 转换,0.0015%F.S(Z小1μm)
非线性:<±0.015%F.S(Z小±50μm)
重复精度:<±0.002%F.S(Z小±3μm)
6.迟滞:<0.002%F.S.
7.温度系数:<0.007%F.S./℃
8.更新时间测量范围:<0.5ms/m
9.供电电源:+24VDC±10%
10.工作电流:<50m A
开地电子提供湖南地区磁致伸缩位移传感器,***产品,非线性校正、高稳定长寿命,你值得拥有。

磁致伸缩位移传感器线性度
测量:在传感器测量整个0~80mm范围内,旋动螺旋测微器分别每隔5mm记一组数据,位置磁铁相应移动,连续取测量数据20组,如图3。
线性度的指标公式为
式中:el为非线性误差(线性度);△max为比较大非线性***误差;YFS为输出满量程。
从图3可知,采用**小二乘法拟合直线的斜率为0.992,直线方程为Y = 0.15784+0. 992X,因此在0~80 mm范围内的线性度为0.387%。
磁致伸缩位移传感器迟滞
将螺旋测微器在传感器的正反两个方向量程内来回移动,测量范围为0~80mm,测到的数据如图4。其中有正向测量和反向测量数值(每隔5mm测量1次),以及正反方向测量的差值△H。
由迟滞误差公式
式中△Hmax为正反行程输出比较大差值。
从图4知,△Hmax=0.41,而rH=0.256%。
开地电子提供河北地区磁致伸缩位移传感器,***产品,非线性校正、高稳定长寿命,你值得拥有。Posital FRABA智能化磁致伸缩位移传感器接线
开地电子提供河南地区磁致伸缩位移传感器,***产品,非线性校正、高稳定长寿命,你值得拥有。Posital FRABA智能化磁致伸缩位移传感器接线
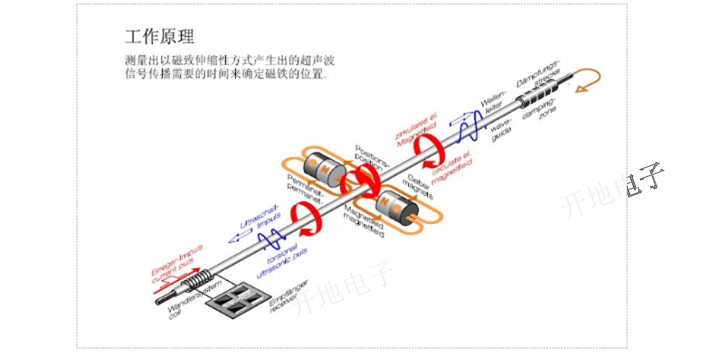
磁致伸缩位移传感器的原理
磁致旋转波位移传感器,除位置磁铁外,所有其他元器件都安装在传感器壳体内,组成传感器的主**置磁铁通常装在一个运动部件A上,而传感器主体则装在一个固定的部件B上。
传感器工作时,电子信号和处理系统发给磁致波导钢丝间隔为T的激励脉冲电流ie该脉冲电流将产生一个围绕波导钢丝的旋转磁场。位置磁铁也产生一个固定的磁场。根据Widemanm效应,金属随其瞬间变形产生波导扭曲,使波导钢丝产生磁致弹性伸缩,即形成一个磁致旋转波。磁致旋转波的传播速度为,式中:G为波导管的剪切弹性模量;ρ为波导管密度。
Posital FRABA智能化磁致伸缩位移传感器接线
上一篇: 原装进口 SSI磁致伸缩位移传感器多少钱
下一篇: POSITAL FRABA单圈编码器报价