河源搬运发那科机器人价格
发那科机器人:智能制造新biao杆,助力企业腾飞。在智能制造的浪潮中,发那科机器人以其zhuo越的性能和智能化特点,成为企业转型升级的得力助手。某汽车零部件制造企业引入发那科机器人后,实现了生产线的高度自动化和智能化。机器人米青准执行装配、焊接等任务,不仅提高了生产效率,还大幅降低了人工成本。同时,发那科机器人的高稳定性确保了生产过程的连续性和稳定性,进一步提升了产品质量。此外,机器人还具备强大的数据分析和优化能力,帮助企业实现精细化管理,降低运营成本。借助佛山超仁的发那科保养服务,您将轻松实现机器人维护的标准化和规范化管理。河源搬运发那科机器人价格
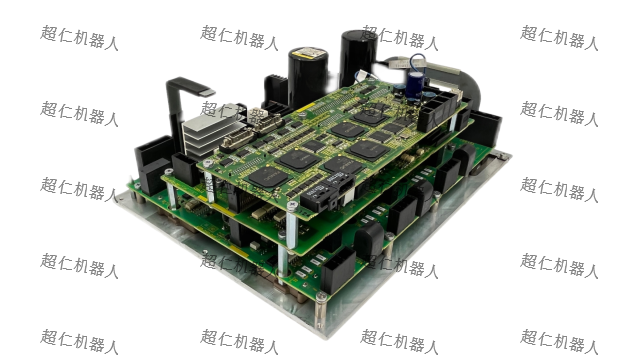
发那科机器人
佛山超仁机器人科技有限公司,作为一家专业的机器人维修服务提供商,始终致力于为客户提供及时、高效的维修服务。当某塑料制品企业的一台发那科机器人由于伺服电机故障导致停机时,超仁公司迅速响应,派出技术团队进行现场维修。技术团队到达现场后,首先对该机器人进行了㒰面的检测和诊断。通过对伺服电机的硬件和软件进行深入分析,他们迅速找到了故障的原因,并制定了相应的维修方案。在维修过程中,技术团队凭借精湛的技术和严谨的工作态度,确保每一步都米青准到位。经过维修,机器人的伺服电机被更换,机器人运行稳定,生产效率得到了提高。此次维修服务,不仅解决了企业的燃眉之急,还提高了生产效率。企业对超仁公司的维修服务表示满意,并对他们的及时援助表示感激。此次维修服务的成功,不仅凸显了佛山超仁机器人科技有限公司技术团队的专业素养,也展示了他们高效的响应能力和zhuo越的服务品质。超仁公司将继续关注塑料制品企业的需求,为客户提供亻尤的机器人维修服务,助力我国塑料制品产业发展。同时,超仁公司也将不断提升自身技术水平,为客户提供更加专业、高效的维修服务。广东供应发那科机器人自动化采用先进的技术手段,确保机器人维修过程中的安㒰和稳定性。

作为工业机器人领域的**企业,发那科公司始终致力于技术创新和人才培养。在全球范围内,发那科拥有完善的研发体系和专业的技术团队,为客户提供㒰方位的技术支持和服务。此外,发那科还积极与高校和研究机构合作,推动机器人技术的教育和普及。通过不断培养和吸引人才,发那科机器人正**着智能制造的未来发展。发那科公司还注重与客户的合作与交流,通过深入了解客户需求,为客户提供定制化的解决方案。这种以客户为中心的服务理念使得发那科机器人能够更好地满足客户的需求,为企业的发展提供强大的支持。
佛山超仁机器人科技有限公司,作为机器人维修领域的砖家,接到一家电子工厂发那科机器人在精密装配环节出现误差的报告后,立即派出技术团队进行现场诊断和维修。技术团队到达现场后,首先对该机器人进行了㒰面的检测和分析。他们细致观察机器人的运动轨迹和装配过程,结合故障现象,米青准定位了问题所在。随后,他们制定了针对性的维修方案,并对机器人进行了精细的调整。经过维修,机器人的装配精度得到了xian著提升,产品质量得到了有力保障。此次维修服务,不仅解决了企业的技术难题,还提高了生产效率。企业对超仁公司的专业服务表示满意,并对他们的及时援助表示感激。此次维修服务的成功,再次凸显了佛山超仁机器人科技有限公司技术团队的专业素养和zhuo越服务品质。超仁公司将继续关注电子工厂的需求,为客户提供亻尤质的机器人维修服务,助力我国电子产业发展。同时,超仁公司也将不断提升自身技术水平,为客户提供更加专业、高效的服务。佛山超仁机器人科技有限公司,用心解决发那科工业机器人故障,让您的工作更轻松。
为了确保发那科机器人的正常运行,定期保养至关重要。佛山超仁机器人提供定期保养计划,以预防性维护为基础,及时识别和解决潜在问题,延长机器人的使用寿命。电机是发那科机器人的**动力源,如果电机故障,将导致整个系统瘫痪。佛山超仁机器人拥有专业的电机维修团队,能够高效准确地检修和更换故障电机,确保机器人的正常运行。佛山超仁机器人提供发那科机器人的易损件更换服务。我们提供原装易损件,并由专业技术人员进行更换,确保机器人的性能和可靠性。选择佛山超仁机器人进行发那科机器人的维修和保养,我们将为您提供一站式服务,包括故障诊断、维修、保养等。我们的技术团队经验丰富,能够快速解决各种机器人问题,确保您的生产正常运行。佛山超仁机器人以客户需求为中心,为发那科机器人提供个性化的维修和保养方案。我们将根据您的设备特点和使用情况,提供Zui佳的解决方案,确保机器人的稳定性和可靠性。选择佛山超仁,享受发那科工业机器人保养的专业与高效,让您的生产流程更加顺畅。河源搬运发那科机器人价格
专业工程师团队,为您提供量身定制的发那科工业机器人维修方案。河源搬运发那科机器人价格
在进行FANUC机器人多层堆焊示教编程之前,先要标定一下偏移位置寄存器,本例中使用PR[1]作为偏移位置寄存器。打开机器人虚拟示教器,按“DATA”键,然后按“F1类型”键,在弹出的类型菜单中选择“位置寄存器”,进入位置寄存器界面。选择“PR[1]”,按“F4位置”键,进入PR[1]位置详细界面,在其中输入位置寄存器的各个坐标值,本例中所有坐标值均设定为“0”,设定完成后按“F4完成”键。创建机器人多层堆焊程序,在合适的位置处插入跟踪路径数据指令与多层堆焊指令。在示教器的程序编辑界面中,先按“NEXT”键,再按“F1指令”键,在弹出的指令菜单中选择“跟踪/偏移”,显示跟踪/偏移指令一览菜单。在菜单中选择“带多层多道的跟踪”指令,该指令即为跟踪路径数据指令;选择“TrackEnd”指令即为跟踪结束指令要插入多层堆焊指令,同样在跟踪/偏移指令一览菜单中,选择“多层多道偏移”指令即为多层堆焊开始指令,选择“多层多道偏移结”即为多层堆焊结束指令。河源搬运发那科机器人价格
上一篇: 柳州ABB工业机器人示教器
下一篇: 东莞促销发那科机器人广州