新代五轴
在车爪子过程中,选用合适的车刀是非常重要的一点。首先,要选择刀头尺寸适当、材质硬度高的车刀,以确保切削力度足够强。其次,要选择适合当前工件形状的车刀,避免出现爪子夹紧不牢或者切削不将的情况。二、调整夹紧力度在开始车床操作之前,需要先调整好夹紧力度,使之达到比较好效果。这里需要注意的是,夹紧力度不要过大或过小,应该根据不同尺寸的工件进行调整。同时,夹紧力度会随着车刀横向移动而发生变化,因此在操作过程中需要及时进行检查和调整。三、注意刀轨与爪子距离在车床操作过程中,刀轨与爪子的距离也是需要注意的一点。如果太远或太近,都会影响到车床的精度和效率,因此需要仔细测量并进行调整。一般情况下,刀轨与爪子的距离应该保持在2-3mm左右。四、遵守正确的操作流程在进行数控车床车爪子操作时,遵守正确的操作流程非常重要。首先,需要检查车床和工具是否齐备、完好。其次,需要进行安全操作培训,熟悉车床的相关操作规范。,要根据工件形状和车床参数进行详细的设置和调整。加工中心五轴联动技术:提高加工精度与效率的关键。新代五轴

承重旋转平台,如卧车旋转平台,其结构原理主要包括以下几个方面:液压系统:卧车旋转平台的液压系统主要由液压泵、油缸、液压阀和液压管路等组成。液压系统通过加压液压油,通过油缸和阀门等部件实现平台的升降和旋转操作。1机械传动系统:卧车旋转平台的机械传动系统主要由传动轴、齿轮和齿条等部件组成。齿轮和齿条之间的啮合关系实现平台的旋转。电子控制系统:卧车旋转平台的电子控制系统主要由控制器、传感器、电磁阀组成。控制器接收传感器的信号,控制液压阀门的开闭,控制电磁阀的状态,从而实现平台的升降和旋转。这些原理共同作用,使得卧车旋转平台能够实现精确的旋转和移动,满足不同的工作需求。江门五轴加工机床在加工过程中,需要不断进行检查和调试,确保加工整个过程安全可靠。
五轴机械手品牌众多,包括但不限于瑞博、康弗斯牌、宏盛牌、统益牌、顺成智能、深隆、高工智能、鸿信、高雨、智涂、旺特、伯朗特(brtro7wds5pc、brtn30wss5pc、brtr13wds5pc)、拓斯达、伯朗特(brtro9wds5p0)、智立、鑫科源、hongxin、伊凡特、欧米伽、华运隆、赢力、runpard、toney/统一、佶福、中科华恒、鑫磐、腾龙、borunte、sintd/台达、victor、kmans、winstwo、geekway、科力特焊割、kemansi等东莞京雕教育,CNC数控编程培训、车铣复合培训、浮雕技术培训、三轴和五轴机技术培训、UG产品设计培训
通过大量的实际操作和实践经验不断提高技术水平;3. 与其他工程师进行交流、讨论和技术分享也是一个非常有效的学习方法。4. 在对四五轴车铣复合机床有了基本的了解后, 可以尝试参与一些项目并逐渐增加难度, 以锻炼自己的编程能力和积累经验。5. 一般而言,成为一名熟练的四五轴编程员可能需要两三年甚至更长时间的学习和实践。当然这并不是的,还要考虑到每个人的学习进度和理解能力等因素。6. 一点也是重要的一点是不断坚持和提高自己,只有不断地学习和进步才能够适应日益发展的制造业需求。东莞京雕教育,CNC数控编程培训、车铣复合培训、浮雕技术培训、三轴和五轴机技术培训、UG产品设计培训五轴刀尖跟随原理是数控技术。

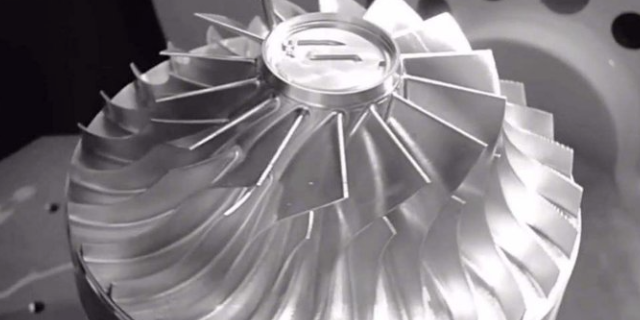
五轴加工中旋转轴的运动会造成加工奇异问题,影响零件表面加工质量.以摆头/转台回转型五轴机床为例,通过分析相邻刀轴矢量间运动与实际加工中刀具运动路线的非线性误差,得出旋转变化率为影响五轴加工奇异问题的主要因素.笔者基于旋转变化率提出一种奇异问题优化方法:通过控制旋转变化率对刀轴矢量进行调整,从而有效避免五轴加工中的奇异问题.以叶轮流道为案例,运用该优化方法对加工表面进行实验,验证旋转变化率取值对奇异问题的影响,证明该奇异问题优化方法的可行性.东莞京雕教育,CNC数控编程培训、车铣复合培训、浮雕技术培训、三轴和五轴机技术培训、UG产品设计培训五轴加工可以减少误差的可能性。湛江数控五轴动床式结构
关于五轴的几种形式。新代五轴
五轴机械手的调试方法通常包括以下几个步骤:系统启动和基本设置。启动机械手系统,并通过操作员界面进行基本设置,如输入默认密码,选择高级管理员,调整机器参数等。1调整伺服电机参数。这是调试过程中重要的一步,包括调整电机的正反转和反馈脉冲极性,确保电机方向正确,反馈信号准确。调整机械参数。包括X1、Y1、X2、Y2、Z五个轴的参数,如每转距离、原点信号通断测试、机械长度和比较大移动量等。旋转轴的电机调整和校准。确保旋转轴在零位时准确对齐,调整电机步距角以满足旋转角度要求,验证旋转轴方向是否正确。2轴向对准。使用专业工具确保旋转轴的平级度与垂直度,提高旋转精度,减少误差。检查传感器。确保传感器正常工作,通过手动运动机械手观察传感器的输出信号是否与实际位置一致。34零点校准。将机械手手动移动到工作区域的比较大或是小坐标,按下零点校准按钮进行校准。设置程序。根据机械手的运动参数和位置信息编写程序,并进行测试验证。手动和编程控制。使用手控器或编程语言控制机械手进行移动和操作,确保操作安全,调试效果满足要求。新代五轴
上一篇: 江门ABC真假五轴介绍资料
下一篇: 深圳新代五轴数控培训