包头非隧道式汽车面漆检测设备价格
仿佛整个车漆层都在发光,闪烁着金属的光泽。金属漆目前使用范围广,大多数深色都是金属漆,如红、黄、蓝、绿、紫、银、灰。(3)、珠光漆,可以理解为把金属漆中的铝粉换成云母或者珍珠粉(极少厂家使用),金属漆就变成了珠光漆了。珠光漆目前来讲主要是白色,也常被叫做珍珠白,珠光白,在光照下,并不是单纯的白色,而是一种珍珠般的色泽。这是云母本身是片状的透明晶体,当光线射入漆层后,经云母片会发生非常复杂的折射和干涉的情况,并且云母本身就带有部分绿、棕、黄和粉红的色调,这就使得珠光漆在主色调的基础上,增加了极为丰富的珍珠般的闪光。同一个漆面,从不同的角度看去都会有着微妙的变化,色彩的丰富性和渲染力大为增加,给人一种豪华高贵的感受。4、清漆层清漆层就是车漆的外层,一个我们能够用指尖直接触摸的透明漆层。清漆的作用主要是提高漆面光泽,提升质感,防紫外线,防轻微的刮擦。虽然说原车车漆有好几层,但是依然比较薄,后期担心车漆问题,还是需要做镀晶或者隐形车衣保护的。车漆保养方法有哪些车漆保护的正确做法:1、尽量把车停放在车库里,停车的时候不要有强阳光暴晒,减少雨淋。2、擦车不要干擦,上面的小沙励可能会磨损漆面。实时检测汽车面漆的橘皮纹,提升涂层的美观度。包头非隧道式汽车面漆检测设备价格
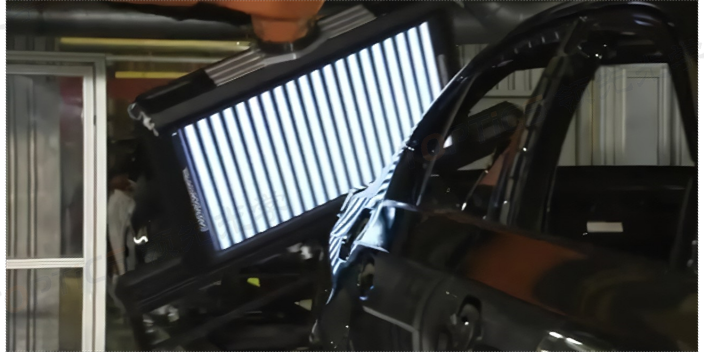
汽车面漆检测设备
这种漆膜缺陷自动检测技术有速度快、效率高、精度高、检测范围广以及稳定性强等优点。本文主要对漆膜缺陷自动检测技术原理、特点以及在汽车涂装工业中的应用进行介绍和总结。1汽车车身漆膜缺陷和人工检查汽车面漆喷涂工艺及漆膜构成随着喷涂技术的发展,汽车面漆喷涂工艺经历了从3C2B传统喷涂工艺、3C1B“湿碰湿”工艺到B1B2免中涂工艺的过程,喷涂材料也由溶剂型逐渐发展到水性,喷涂设备主要使用手工喷枪、往复机、机器人静电旋杯喷涂等。绝大部分的金属底材汽车车身漆膜都可以归纳为图1所示的构成。漆膜缺陷种类漆膜缺陷细分有上百种之多,根据产生的原理和相似性可以大致归纳为以下几类:1)颗粒、异物等附着导致漆膜表面突起的缺陷;2)表面张力不同而导致的缩孔类缺陷;3)流挂类缺陷;4)针式;5)气泡;6)沾污、斑点类缺陷;7)颜色缺陷,包括目视色差、发花、遮盖不良等;8)外观不良,包括橘皮、失光等;9)打磨不良导致的缺陷,包括打磨痕、抛光斑等;10)漆膜划伤、磕碰或部分脱落导致的缺陷,包括划痕、磕伤和漆膜脱落等缺陷。人工漆膜缺陷检查和修饰在涂装生产过程中,这些缺陷产生的区域、严重程度各不相同,因此处理方式也相应地有不同的标准。丹东汽车面漆检测设备价格这款检测设备能够快速识别汽车面漆的微小瑕疵,确保完美涂装。
目前汽车车身的漆面缺陷检测主要是依赖传统的人工目视检查,因检测效率低、检测标准不够客观,并且容易受人工分心、疲劳等主观因素的影响,越来越难以满足工艺过程的测量和检测要求。因此,对自动化缺陷检测装置的需求日益增强,这种自动化缺陷检测装置不仅可以严格地管控产品质量,还能及时对产品缺陷进行工艺溯源,为工艺品质改善提供数据支持。车身漆面的缺陷种类繁多,不同的生产厂家对缺陷的定义存在差异。从缺陷的光学成像形式可以归类为:色差类缺陷、脏污类缺陷、纹理类缺陷、划伤碰伤类缺陷、凹凸类缺陷。单一的2d成像方式和检测方法难以应对常见的缺陷,对所有缺陷同时的检测,往往需要2d成像方式和3d成像方式相互结合。3d成像方式中激光三角法和条纹投影,是对高度的重建。基于条纹投影原理的三维重建设备,主要应用于漫反射物体。激光三角法可以应用于类镜面物体的高度测量,但是难以检测微米级别的缺陷。3d成像方式中,光度立体法和条纹反射(相位测量偏折术)是对梯度的重建。基于朗伯光照模型的光度立体法对漫反射表面的梯度重建精度较高,但很难直接应用于镜面物体。相位测量偏折术对镜面物体的梯度重建精度很高,在原理上可以到达亚微米级别。
传统图像算法中特征提取主要依赖人工设计的提取器,需要有专业知识及复杂的参数调整过程,分类决策也需要人工构建规则引擎,每个方法和规则都是针对具体应用的.泛化能力及鲁棒性较差。具体到缺陷检测的应用场景,需要先对缺陷在包括但不限于颜色、灰度、形状、长度等的一个或多个维度上进行量化规定,再根据这些量化规定在图像上寻我符合条件的特征区域,并进行标记。传统图像处理有很多算法库,如Halcon、VisionPro和OpenCV等,一般采用编程语言调用算法库的形式来实现。常用的经典检测算法有Roberts算子,Sobel算子,Previtt算子,IOG算子和Canny算子等.Canny算子是1种边缘检测算法,设定了信噪比准则定位精度准则单一边缘响应准则来提高边缘检测精度。为满足这了条准则.CANNYJ在一阶微分算子的基础上,增加了2项改进.即非极大值抑制和双阈值。非极大值抑制能控制多边缘响应和边缘定位精度;双阈值能减少边缘的漏检率。汽车面漆检测设备具备强大的数据存储功能,方便用户随时查看历史数据。

深度学习算法主要是数据驱动进行特征提取和分类决策,根据大量样本的学习能够得到深层的、数据集特定的特征表示,其对数据集的表达更高效和淮确、所提取的抽象特征魯棒性更強,泛化能力更好,但检测结果受样本集的影响较大。深度学习通过大量的缺陷照片数据样本训练而得到缺陷判别的模型参数,建立出一套缺陷判别模型,终目标是让机器能够像人一样具有分析学习能力能够识別缺陷。深度学习算法基于TensorFlow和Keras框架,常用的深度学习算法有ResNet、MobileNet、MaskR-CNN和FasterR-CNN等。FasterR-CNN是以RPN(注意力网络)和CNN(卷积神经网络)为算法框架,其中RPN用于生成可能存在目标的候选区域(Proposal),CNN用于对候选区域内的目标进行识别并分类,同时进行边界回归调整候选区域边框的大小和位置使其更精淮地标识缺陷目标。FasterR-CNN相比前代的R-CNN和FastR-CNN比较大的改进是将卷积结果共享给RPV和FastR-CNN网络,在提高准确率的同时提高了检测速度。总体来讲,传统图像算法是人工认知驱动的方法,深度学习算法是数据驱动的方法。深度学习算法一直在不断拓展其成用的场景.但传统图像方法因其成熟、稳定等特征仍具有应用价值。目前。专业的汽车面漆检测设备,为汽车涂装行业保驾护航。江苏代替人工汽车面漆检测设备源头厂家
先进的汽车面漆检测设备,确保涂层质量无可挑剔。包头非隧道式汽车面漆检测设备价格
检测算法识别漆面缺陷的过程分以下4步:图像采集、预处理、特征提取和分类决策.图像采集是指通过检测系统获取到的车身不同部位漆面的图像信息。预处理主要是指图像处理中的灰度化处理图像滤波、裁剪分割、形态学处理等操作.去除非必要检测区域,加强图像的重要特征,使缺陷特征更容易被提取出来。特征提取是指采用某种度量法则,进行缺陷特征的抽取和选择,简单的理解就是将图像上的漆面缺陷与正常漆面,利用某种方法将它们区分。分类决策是指构建某种识别规则,通过此识别规则可以将对应的特征进行归类和判定,主要应用手漆面缺陷的分类.以指导后续的打磨抛光操作。目前,常用的漆面缺陷检测算法主要分为2类:传统图像算法和深度学习算法。这2种算法的主要区别在于特征提取和分类决策的差异。包头非隧道式汽车面漆检测设备价格
上一篇: 武汉工业质检汽车面漆检测设备哪家好