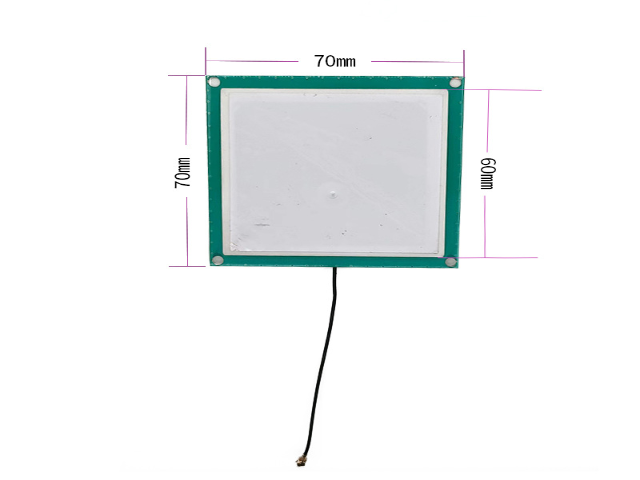
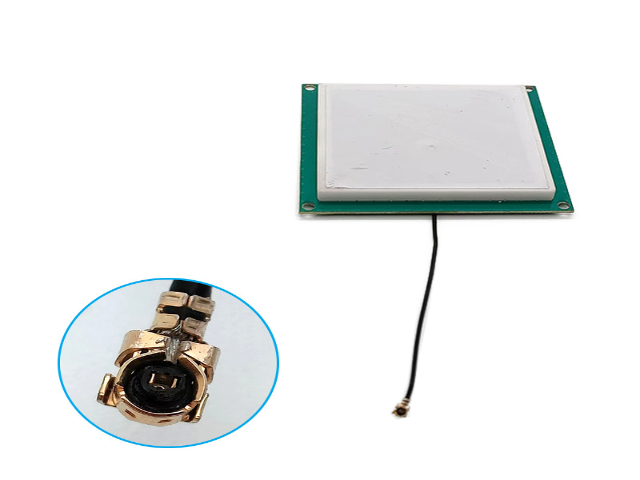
江苏方向图RFID陶瓷天线
RTK 的技术特点:
1、工作效率高:在一般的地形地势下,高质量的RTK设站一次即可测完4km半径的测区,**减少了传统测量所需的控制点数量和测量仪器的设站次数,移动站一人操作即可,劳动强度低,作业速度快,提高了工作效率。
2、定位精度高:只要满足RTK的基木工作条件,在一定的作业半径范围内(一般为4km)RTK的平而精度和高程精度都能达到厘米级。
3、全天候作业:RTK测量不要求基准站、移动站间光学通视,只要求满足“电磁波通视”,因此和传统测量相比,RTK测量受通视条件、能见度、气候、季节等因素的影响和限制较小,在传统测量看来难于开展作业的地区,只要满足RTK的基木工作条件,它也能进行快速的高精度定位,使测量工作变得史容易史轻松,
4、RTK测量自动化、集成化程度高,数据处理能力强:RTK可进行多种测量内、外业工作。移动站利用软件控制系统,无需人工干预便可自动实现多种测绘功能,减少了辅助测量工作和人为误差,保证了作业精度。
5、操作简单,易于使用:现在的仪器一般都提供中文菜单,只要在设站时进行简单的设置,就可方便地获得二维坐标。数据输入、存储、处理、转换和输出能力强,能方便地与计算机、其他测量仪器通信。 RFID陶瓷天线可以通过无线电波与RFID标签进行通信,实现数据的读写和传输。江苏方向图RFID陶瓷天线
GPS定位系统的用户部分的设备**是GPS接收机,一般由主机、天线、电源和数据处理软件等组成,其主要功能是接收GPS卫星发播的导航信号,捕获和跟踪各卫星信号的伪随机噪声码(以下简称伪码)和载波,从中解调出卫星星历、星钟改正参数等。通过测量本地伪随机噪声码与卫星的伪随机噪声码之间的时延测定伪距观测值,通过测量载波频率变化和载波相位获取伪距变率和载波相位观测值。根据获取的这些数据,计算出用户接收机的三维位置(经度,纬度和高程)、速度和时间信息。GPS接收机按其用途,可分为导航型、精密测地型和授时型三类:按接收机所接收的卫星信号和观测量,可分为C/A码伪距接收机,C/A码、P码伪距接收机,C/A码伪距、L1载波相位接收机,C/A码伪距、P码伪距、L1载波相位接收机,L2载波相位接收机:按动态性能则可分为高动态、中动态和低动态GPS接收机。测量仪RFID陶瓷天线技术指导RFID陶瓷天线可以实现多标签的同时读取和识别。
不同频段RFID射频的特性:(1)超高频(UltraHighFrequency):使用的频段范围为400MHz~1GHz,常见的主要规格有433MHz、868~950MHz。这个频段通过电磁波方式进行能量和信息的传输。主动式和被动式的应用在这个频段都很常见被动式标签读取距离约3~10m传输速率较快,一般也可以达到100kbps左右,而且因为天线可采用蚀刻或印刷的方式制造,因此成本相对较低。由于读取距离较远、信息传输速率较快,而且可以同时进行大数量标签的读取与辨识,因此特别适用于物流和供应链管理等领域。但是,这个频段的缺点是在金属与液体的物品上的应用较不理想同时系统还不成熟读写设备的价格非常昂贵,应用和维护的成本也很高。此外,该频段的安全性特性一般不适合安全性要求高的应用领域。(2)微波(Microwave):使用的频段范围为1GHz以上,常见的规格有、。微波频段的特性与应用和超高频段相似,读取距离约为2公尺,但是对于环境的敏感性较高。由于其频率高于超高频,标签的尺寸可以做得比超高频更小,但水对该频段信号的衰减较超高频更高,同时工作距离也比超高频更小。
对影响 RTK测量精度的误差研究,分为对多路径效应的偶然误差,对卫星信号传播、卫星星历、卫星钟差等系统误差的研究。T.H.DiepDao研究了从硬件方面采用垂直地面天线减少进入接收机内部的反射波,以减弱多路径效应对精度的影响算出整周模糊度的情况下即使增加观测卫星的数量也不能明显提高测量精度。郑作亚研究了用灰色系统预报GPS卫星钟差,认为灰色系统模型使用少量的几个已知历元的卫星钟差来建模,提高了建模速度,所建立的模型对卫星钟差的长期预报的精度有***的提高A蔡昌盛对利用GPS载波相位组合观测值建立区域电离层模型进行了研究翊腾电子的RFID陶瓷天线可以实现数据的远程采集和分析。

基于MIMU和双天线RTK的姿态测量方法主要包括以下三个步骤:1.传感器数据采集首先需要对MIMU和双天线RTK进行数据采集,以获取物体的加速度、角速度、磁场变化和位置等数据。同时,需要对天线位置进行标定,以消除天线位置误差带来的影响。2.数据预处理将采集到的数据进行预处理,包括对加速度和角速度数据进行零偏误差和尺度因数校正,对磁场数据进行硬铁和软铁矫正,以及校正双天线位置误差和多径误差等,3.姿态解算将校正后的MIMU数据和双天线RTK位置数据进行姿态解算,**终得到物体的姿态信息。四、结论与展望基于MIMU和双天线RTK的姿态测量方法能够实现高精度的姿态测量,具有一定的应用前景。但该方法还存在一些局限性,如需要进行数据预处理、双天线RTK设备价格昂贵等。因此,在未来的研究中,可以对其进行优化和完善,以提高精度和降低成本,推动该技术在机器人等领域的应用。 RFID陶瓷天线可以在恶劣环境下工作,如高温、湿度和腐蚀等。定位精度RFID陶瓷天线滤波器
RFID陶瓷天线的安装位置和方向对其性能和读取范围有影响。江苏方向图RFID陶瓷天线
手机RTK测量操作流程:
1.手机RTK测量前,今需要找到一个开阔,视野良好的地方,尽可能减小误差.
2.按照网站上给出的差分信号源的设置要求进行设置。
3.根据实际需要,选择合适的测量模式。
4.进行校准,保证测量的精度和可靠性。
5.进行底座设置,将手机稳固地放置在底座上。
6.打开软件,进行实时测量。在测量过程中,可以通过软件实时观察结果,及时进行调整。
7.测量完成后,将数据进行下载和保存,并进行数据后处理,得到符合实际需要的测量结果。 江苏方向图RFID陶瓷天线
上一篇: 工作电压RFID陶瓷天线厂家供应
下一篇: CN值RFID陶瓷天线测试